









文章目录
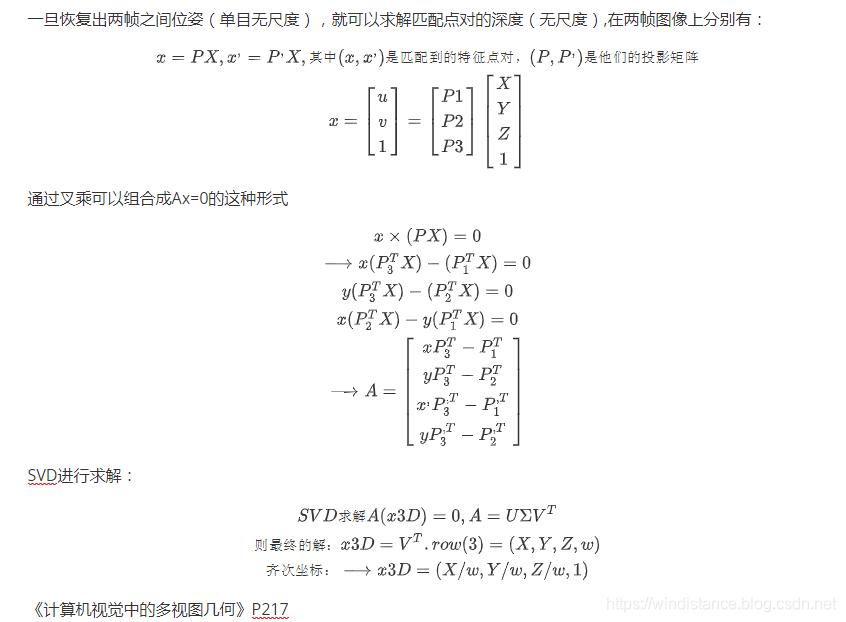
第三阶段:三角化测量得到初始的特征点深度
如果恢复相机初始位姿成功,那么我们能得到前两帧图像的位姿,以及三角测量后的3维地图点,这些都是在Initialize()函数里面完成的。
if(mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated))
{
// 步骤6:删除那些无法进行三角化的匹配点
for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++)
{
if(mvIniMatches[i]>=0 && !vbTriangulated[i])
{
mvIniMatches[i]=-1;
nmatches--;
}
}
// Set Frame Poses
// 将初始化的第一帧作为世界坐标系,因此第一帧变换矩阵为单位矩阵
mInitialFrame.SetPose(cv::Mat::eye(4,4,CV_32F));
// 由Rcw和tcw构造Tcw,并赋值给mTcw,mTcw为世界坐标系到该帧的变换矩阵
cv::Mat Tcw = cv::Mat::eye(4,4,CV_32F);
Rcw.copyTo(Tcw.rowRange(0,3).colRange(0,3));
tcw.copyTo(Tcw.rowRange(0,3).col(3));
mCurrentFrame.SetPose(Tcw);
...
先将当前帧位姿Tcw设置好,之后第四阶段CreateInitialMapMonocular () 创建初始地图,并进行相应的3D点数据关联操作。
三角化的程序:
ORB_SLAM2/src/Initializer.cpp--void Initializer::Triangulate()
...
//给定投影矩阵P1,P2和图像上的点kp1,kp2,从而恢复3D坐标
void Initializer::Triangulate(const cv::KeyPoint &kp1, const cv::KeyPoint &kp2, const cv::Mat &P1, const cv::Mat &P2, cv::Mat &x3D)
{
// 在DecomposeE函数和ReconstructH函数中对t有归一化
// 这里三角化过程中恢复的3D点深度取决于 t 的尺度,
// 但是这里恢复的3D点并没有决定单目整个SLAM过程的尺度
// 因为CreateInitialMapMonocular函数对3D点深度会缩放,然后反过来对 t 有改变
cv::Mat A(4,4,CV_32F);
A.row(0) = kp1.pt.x*P1.row(2)-P1.row(0);
A.row(1) = kp1.pt.y*P1.row(2)-P1.row(1);
A.row(2) = kp2.pt.x*P2.row(2)-P2.row(0);
A.row(3) = kp2.pt.y*P2.row(2)-P2.row(1);
cv::Mat u,w,vt;
cv::SVD::compute(A,w,u,vt,cv::SVD::MODIFY_A| cv::SVD::FULL_UV);
x3D = vt.row(3).t();
x3D = x3D.rowRange(0,3)/x3D.at<float>(3);
}
第四阶段: 将三角化得到的3D点包装成MapPoints,然后做 BA
MapPoints类的主要目的是对环境中真实存在的点进行描述,因此不仅要记录点的信息,还有点的观测信息 等,主要包含的成员变量:
// Position in absolute coordinates
cv::Mat mWorldPos; ///< MapPoint在世界坐标系下的坐标
// Keyframes observing the point and associated index in keyframe
std::map<KeyFrame*,size_t> mObservations; ///< 观测到该MapPoint的KF和该MapPoint在KF中的索引
// Mean viewing direction
// 该MapPoint平均观测方向
cv::Mat mNormalVector;
// Best descriptor to fast matching
// 每个3D点也有一个descriptor
// 如果MapPoint与很多帧图像特征点对应(由keyframe来构造时),那么距离其它描述子的平均距离最小的描述子是最佳描述子
// MapPoint只与一帧的图像特征点对应(由frame来构造时),那么这个特征点的描述子就是该3D点的描述子
cv::Mat mDescriptor; ///< 通过 ComputeDistinctiveDescriptors() 得到的最优描述子
// Reference KeyFrame
KeyFrame* mpRefKF;
// Tracking counters
int mnVisible; //理论上该地图点被观测到的次数
int mnFound;//实际上该地图被观测到的次数
1.创建并插入关键帧
因为只有前两帧,所以将这两帧都设置为关键帧(KeyFrame* pKFini = new KeyFrame(mInitialFrame,mpMap,mpKeyFrameDB);),并计算对应的BoW(pKFini->ComputeBoW();),并在地图中插入这两个关键帧(mpMap->AddKeyFrame;)。这个两个关键帧会被 mspKeyFrames (std::set<KeyFrame*> mspKeyFrames;)这个集合记录,并且会更新记录此时关键帧的id(mnMaxKFid)。
2.创建地图点,并且关联到关键帧
将3D点包装成地图点,将地图点与关键帧,地图进行数据关联。
地图点的构建需要三个参数:Pos( MapPoint的坐标(wrt世界坐标系))、pRefKF(关键帧)、pMap (Map),调用MapPoint* pMP = new MapPoint(worldPos,pKFcur,mpMap);生成新的地图点。
地图点与关键帧关联
一个地图点可被多个关键帧观测到,将观测到这个地图点的关键帧与这个地图点进行关联,同时记录关键帧上哪一个特征点与这个地图点有关联。
void KeyFrame::AddMapPoint(MapPoint *pMP, const size_t &idx)
函数,将地图点关联到关键帧,记录在关键帧的mvpMapPoints中(std::vector<MapPoint*> mvpMapPoints;),此时还没有加入到map
void MapPoint::AddObservation(KeyFrame* pKF, size_t idx)
函数记录KeyFrame的那个特征点能观测到该MapPoint ,这些信息被记录在地图点上mObservations( std::map<KeyFrame*,size_t> mObservations;),并增加观测的相机数目nObs,单目+1,双目或者grbd+2,这个函数是建立关键帧共视关系的核心函数,能共同观测到某些MapPoints的关键帧是共视关键帧
void MapPoint::ComputeDistinctiveDescriptors()计算具有代表的描述子
由于一个MapPoint会被许多相机观测到,因此在插入关键帧后,需要判断是否更新当前点的最适合的描述子 先获得当前点的所有描述子,然后计算描述子之间的两两距离,最好的描述子与其他描述子应该具有最小的距离中值
void MapPoint::UpdateNormalAndDepth()更新平均观测方向以及观测距离范围
因此在插入关键帧后,需要更新相应变量(获得观测到该MapPoint的所有关键帧,观测到该点的参考关键帧,MapPoint在世界坐标系中的位置,观测到该MapPoint的平均观测方向以及距离范围)
跟踪并且更新当前的帧信息:
ORB_SLAM2/src/Tracking.cpp-成员变量
...
Frame mCurrentFrame;
ORB_SLAM2/src/Tracking.cpp--void Tracking::CreateInitialMapMonocular()
...
mCurrentFrame.mvpMapPoints[mvIniMatches[i]] = pMP;
mCurrentFrame.mvbOutlier[mvIniMatches[i]] = false;
将地图点加入到地图中
调用成员函数(mpMap->AddMapPoint),将地图点加入到地图的mspMapPoints中(std::set<MapPoint*> mspMapPoints;)
ORB_SLAM2/src/Map.cpp--void Map::AddMapPoint()
...
void Map::AddMapPoint(MapPoint *pMP)
{
unique_lock<mutex> lock(mMutexMap);
mspMapPoints.insert(pMP);
}
3.关键帧与关键帧关联
void KeyFrame::UpdateConnections()
在没有执行这个函数前,关键帧只和MapPoints之间有连接关系,这个函数可以更新关键帧之间的连接关系
首先获得该关键帧的所有MapPoint点,统计观测到这些3d点的每个关键与其它所有关键帧之间的共视程度
对每一个找到的关键帧,建立一条边,边的权重是该关键帧与当前关键帧公共3d点的个数。并且该权重必须大于一个阈值,如果没有超过该阈值的权重,那么就只保留权重最大的边(与其它关键帧的共视程度比较高)对这些连接按照权重从大到小进行排序,以方便将来的处理更新完covisibility图之后,如果没有初始化过,则初始化为连接权重最大的边(与其它关键帧共视程度最高的那个关键帧),类似于最大生成树
4. 执行BA优化
ORB_SLAM2/src/Tracking.cpp--成员变量
...
Map* mpMap;
将跟踪的地图进行BA优化
Optimizer::GlobalBundleAdjustemnt(mpMap,20);
5.尺度归一化
由于单目SLAM的尺度不确定性,也就是场景的绝对尺度具有不可观性。因此将场景地图深度中值作为单位一,归一化第二帧的位姿与所有的地图点。最后需要更新局部地图,局部关键帧和局部地图点,并且更新上一帧,上一关键帧,参考关键帧等变量。
所有流程程序:
ORB_SLAM2/src/Tracking.cpp--void Tracking::CreateInitialMapMonocular()
...
/**
* @brief CreateInitialMapMonocular
*
* 为单目摄像头三角化生成MapPoints
*/
void Tracking::CreateInitialMapMonocular()
{
/*
-----------1.Create KeyFrames 创建关键帧------------
*/
KeyFrame* pKFini = new KeyFrame(mInitialFrame,mpMap,mpKeyFrameDB);
KeyFrame* pKFcur = new KeyFrame(mCurrentFrame,mpMap,mpKeyFrameDB);
// 将初始关键帧的描述子转为BoW
pKFini->ComputeBoW();
// 将当前关键帧的描述子转为BoW
pKFcur->ComputeBoW();
// Insert KFs in the map
// 将关键帧插入到地图
// 凡是关键帧,都要插入地图
mpMap->AddKeyFrame(pKFini);
mpMap->AddKeyFrame(pKFcur);
/*
-----------2.Create MapPoints 创建地图点,并关联关键帧------------
*/
// Create MapPoints and asscoiate to keyframes
for(size_t i=0; i<mvIniMatches.size();i++)
{
if(mvIniMatches[i]<0)
continue;
//Create MapPoint.
cv::Mat worldPos(mvIniP3D[i]);
// 用3D点构造MapPoint
MapPoint* pMP = new MapPoint(worldPos,pKFcur,mpMap);
// 为该MapPoint添加属性:
// a.观测到该MapPoint的关键帧
// b.该MapPoint的描述子
// c.该MapPoint的平均观测方向和深度范围
// 表示该KeyFrame的哪个特征点可以观测到哪个3D点
pKFini->AddMapPoint(pMP,i);
pKFcur->AddMapPoint(pMP,mvIniMatches[i]);
// a.表示该MapPoint可以被哪个KeyFrame的哪个特征点观测到
pMP->AddObservation(pKFini,i);
pMP->AddObservation(pKFcur,mvIniMatches[i]);
// b.从众多观测到该MapPoint的特征点中挑选区分读最高的描述子
pMP->ComputeDistinctiveDescriptors();
// c.更新该MapPoint平均观测方向以及观测距离的范围
pMP->UpdateNormalAndDepth();
//Fill Current Frame structure
mCurrentFrame.mvpMapPoints[mvIniMatches[i]] = pMP;
mCurrentFrame.mvbOutlier[mvIniMatches[i]] = false;
/*
-----------3.Add to Map 在地图中添加该MapPoint------------
*/
//Add to Map
//在地图中添加该MapPoint
mpMap->AddMapPoint(pMP);
}
/*
-----------4.Update Connections and Bundle Adjustment -----------
*/
// Update Connections
// 更新关键帧间的连接关系
// 在3D点和关键帧之间建立边,每个边有一个权重,边的权重是该关键帧与当前帧公共3D点的个数
pKFini->UpdateConnections();
pKFcur->UpdateConnections();
// Bundle Adjustment
cout << "New Map created with " << mpMap->MapPointsInMap() << " points" << endl;
//BA优化
Optimizer::GlobalBundleAdjustemnt(mpMap,20);
/*
-----------5.尺度归一化到1 -----------
*/
// Set median depth to 1
// 将MapPoints的中值深度归一化到1,并归一化两帧之间变换
// 评估关键帧场景深度,q=2表示中值
float medianDepth = pKFini->ComputeSceneMedianDepth(2);
float invMedianDepth = 1.0f/medianDepth;
if(medianDepth<0 || pKFcur->TrackedMapPoints(1)<100)
{
cout << "Wrong initialization, reseting..." << endl;
Reset();
return;
}
// Scale initial baseline
cv::Mat Tc2w = pKFcur->GetPose();
// x/z y/z 将z归一化到1
Tc2w.col(3).rowRange(0,3) = Tc2w.col(3).rowRange(0,3)*invMedianDepth;
pKFcur->SetPose(Tc2w);
// Scale points
// 把3D点的尺度也归一化到1
vector<MapPoint*> vpAllMapPoints = pKFini->GetMapPointMatches();
for(size_t iMP=0; iMP<vpAllMapPoints.size(); iMP++)
{
if(vpAllMapPoints[iMP])
{
MapPoint* pMP = vpAllMapPoints[iMP];
pMP->SetWorldPos(pMP->GetWorldPos()*invMedianDepth);
}
}
// 这部分和SteroInitialization()相似
mpLocalMapper->InsertKeyFrame(pKFini);
mpLocalMapper->InsertKeyFrame(pKFcur);
mCurrentFrame.SetPose(pKFcur->GetPose());
mnLastKeyFrameId=mCurrentFrame.mnId;
mpLastKeyFrame = pKFcur;
mvpLocalKeyFrames.push_back(pKFcur);
mvpLocalKeyFrames.push_back(pKFini);
mvpLocalMapPoints=mpMap->GetAllMapPoints();
mpReferenceKF = pKFcur;
mCurrentFrame.mpReferenceKF = pKFcur;
mLastFrame = Frame(mCurrentFrame);
mpMap->SetReferenceMapPoints(mvpLocalMapPoints);
mpMapDrawer->SetCurrentCameraPose(pKFcur->GetPose());
mpMap->mvpKeyFrameOrigins.push_back(pKFini);
mState=OK;// 初始化成功,至此,初始化过程完成
}
参考
https://www.zhihu.com/question/50385799/answer/120902345
https://blog.csdn.net/zhubaohua_bupt/article/details/78560966
https://blog.csdn.net/u011380574/article/details/77802355
ORB-SLAM: A Versatile and Accurate Monocular SLAM System
http://webdiis.unizar.es/~raulmur/orbslam/
https://github.com/raulmur/ORB_SLAM2
https://en.cppreference.com/w/cpp/algorithm/fill
《计算机视觉中的多视图几何》














 1063
1063











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









