







关注同名微信公众号“混沌无形”,阅读更多有趣好文!
原文链接:机器人空间采样算法研究现状简述(包含原文PDF百度云下载链接)

空间采样算法按照采样空间不同,可分为:状态空间采样和运动空间采样。如图 2.1所示,基于状态空间采样的算法能够在大面积、高纬度的空间中快速生成路径,包括RRT和PRM类算法等,具有概率完备性,其主要步骤包括随机采样、度量连接、碰撞检测和路径查询。基于运动空间采样的算法则在速度空间等距采样,通过评价函数选择最佳控制指令,驱动机器人运动,主要包括CVM类算法及DWA类算法等。
(请横屏看图)
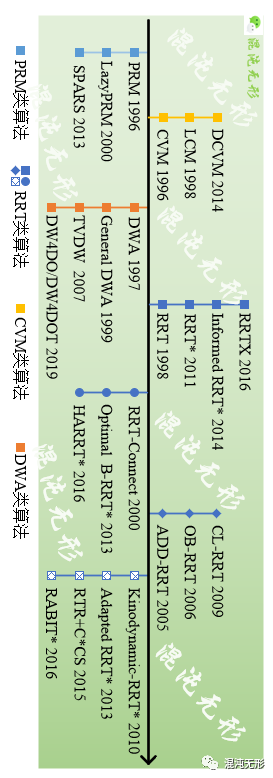
图 2.1 空间采样算法发展路线概况
第一类算法是PRM(Probabilistic Road Map)类算法,此类算法的核心思想是:构建连通图,搜索最佳路径。
构建连通图:在C空间(Configuration Space)(对应图 2.2中的所有区域)中随机抽样,采集一系列点,并检测它们是否在自由空间(白色区域)中,并使用本地规划器尝试将这些采样点相互连接起来,仅保留与障碍物无交集的连线,结合起始点和目标点,得到一张连通图;搜索最佳路径:使用图搜索算法基于上述连通图搜索无碰撞路径。
图 2.2 PRM算法(图片来源:https://en.wikipedia.org/wiki/Probabilistic_roadmap)
结合图 2.1,传统PRM[2]算法基于环境模型构建路径网络图,并查询生成最佳路径,采样点数越多,计算结果越好。Bohlin等人在此基础上进一步拓展,如LazyPRM[3]通过减少调用局部规划器次数(减少不要的碰撞检测)以提升规划效率,SPARS2[4]构建稀疏、稠密双重图,进一步提高算法收敛速度,且渐进最优。
精彩的理论论证过程见原文链接(含全文下载链接)
由于网页排版效果一般,所以笔者按照期刊论文版式为小伙伴们整理了原文PDF,方便收藏和回味。
原文链接:(包含原文PDF百度云下载链接)
CSDN下载链接:移动机器人路径规划之一空间采样算法如果喜欢的话,可以关注我,阅读更多有趣好文!
微信公众号:混沌无形
知乎号:混沌无形
B站:混沌无形R

















 196
196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











