







刚进入大学第一年,跟着老师进行一次机器人类的实践,选择了几年前比较热门的LeGO-LOAM进行研究。在研究完论文后,着手进行实地实践应用。
论文摘要:我们提出了LeGO-LOAM,它是一种轻量级和地面优化的激光雷达里程计和建图方法,用于实时估计地面车辆的六自由度姿态。LeGO-LOAM是轻量级的,因为它可以在低功耗嵌入式系统上实现实时姿态估计。LeGO-LOAM经过地面优化,因为它在分割和优化步骤中利用了地面的约束。我们首先应用点云分割来滤除噪声,并进行特征提取,以获得独特的平面和边缘特征。然后,采用两步Levenberg-Marquardt优化方法,使用平面和边缘特征来解决连续扫描中六个自由度变换的不同分量。我们使用地面车辆从可变地形环境中收集的数据集,比较LeGO-LOAM与最先进的LOAM方法的性能,结果表明LeGO-LOAM在减少计算开销的情况下实现了相似或更好的精度。为了消除由漂移引起的姿态估计误差,我们还将LeGO-LOAM集成到SLAM框架中,并用KITTI数据集进行了测试。
准备:P3-DX机器人,PC,VLP-16激光雷达
方案:由于先锋3机器人内部计算机老化,听从老师建议,只是将P3-DX作为一个移动工具,具体如下图所示: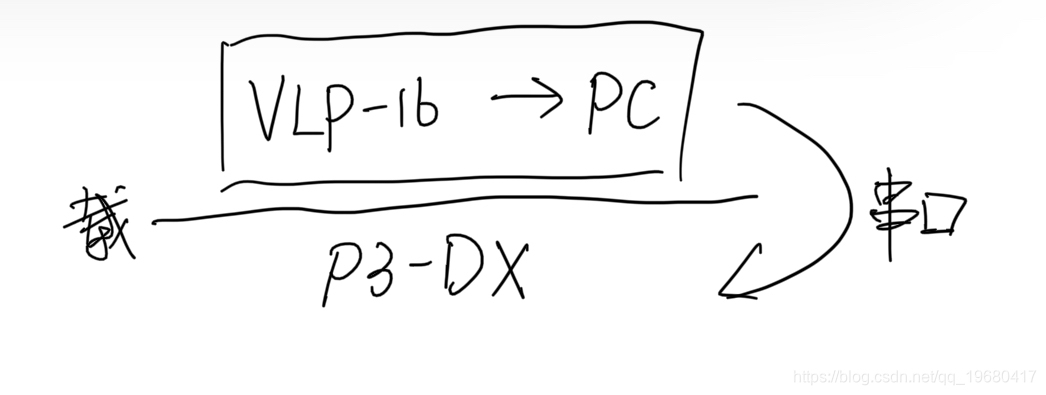
也就是说,需要准备VLP-16和P3-DX分别的驱动/控制端来实现实践。
一、安装ROS与gtsam
使用虚拟机安装Ubuntu 18.04后,在论文Github项目的README中介绍:ROS (tested with indigo, kinetic, and melodic),因此,考虑安装ROS melodic
参考官网信息:melodic/Installation/Ubuntu - ROS Wiki 一步一步安装,具体流程如下:
注意:以下均在Ubuntu系统而非WSL中完成,WSL需要配合XLaunch等。
1、设置sources.list/软件源列表(使计算机能够对口接受软件)
由于官方源网速等问题,此处使用中科大源:(清华源上次使用貌似有问题,故不使用)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'2、设置秘钥
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -如果还没有安装curl,请输入:
sudo apt install curl或者可以使用如下代码
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C6543、安装
sudo apt update
sudo apt install ros-melodic-desktop-full根据不同的情况以及环境,等待的时间可能有长有短。确保ROS Melodic完全安装(可再次键入安装指令第二行确定)后进行下一步。
4、设置环境变量(使用bash的情况)
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc也可以手动添加,在home文件夹显示隐藏的文件,在.bashrc文件最后一行添加
source /opt/ros/melodic/setup.bash
即可
5、安装需要的依赖
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential6、初始化rosdep
sudo apt install python-rosdepsudo rosdep init
rosdep update很多小伙伴在rosdep init出现网络崩溃的问题,我这里的解决方法是使用gedit修改系统的hosts文件(根据不同的环境也可能会失败),添加raw.githubusercontent.com的ip指向。
注:有的时候换成手机热点就能解决。
具体解决方法:
(1)查找网址的hosts,例如,使用这个网址查询其IP地址。
(2)终端输入
sudo gedit /etc/hosts(3)在最后一行添加
185.199.111.133 raw.githubusercontent.com具体的IP请按照查询到的添加。
(4)
sudo rosdep init
rosdep update输入roscore确定是否完全安装成功
7、为LeGO-LOAM建立ROS工作区
mkdir -p ~/catkin_lego/src
cd ~/catkin_lego/
catkin_make
8、安装gtsam
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
cd ~/Downloads/ && unzip gtsam.zip -d ~/Downloads/
cd ~/Downloads/gtsam-4.0.0-alpha2/
mkdir build && cd build
cmake ..
sudo make install二、编译LeGO-LOAM
cd ~/catkin_lego/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1第一次编译时需要添加 -j1以产生一些消息类型,之后就不需要了。
由于不是播放bag文件,所以之后进入文件夹/home/tony/catkin_lego/src/LeGO-LOAM/LeGO-LOAM/launch,进入run.launch文件,将use sim time的值改为false以取消仿真模拟。(如下图)


















 5117
5117

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









