







1.lego-loam的安装编译——踩坑->填坑
1.1 lego-loam编译
** 踩坑:clouds-msgs 找不到**
// lego-loam的安装编译
https://blog.csdn.net/qq_36396941/article/details/83513121
// lego-loam 编译找不到clouds-msgs
https://blog.csdn.net/weixin_42194536/article/details/107100229
// catkin_make 只编译工作空间下一个功能包
https://blog.csdn.net/qq_25458977/article/details/103963286
单独编译legoloam
catkin_make -DCATKIN_WHITELIST_PACKAGES="lego_loam" -j1
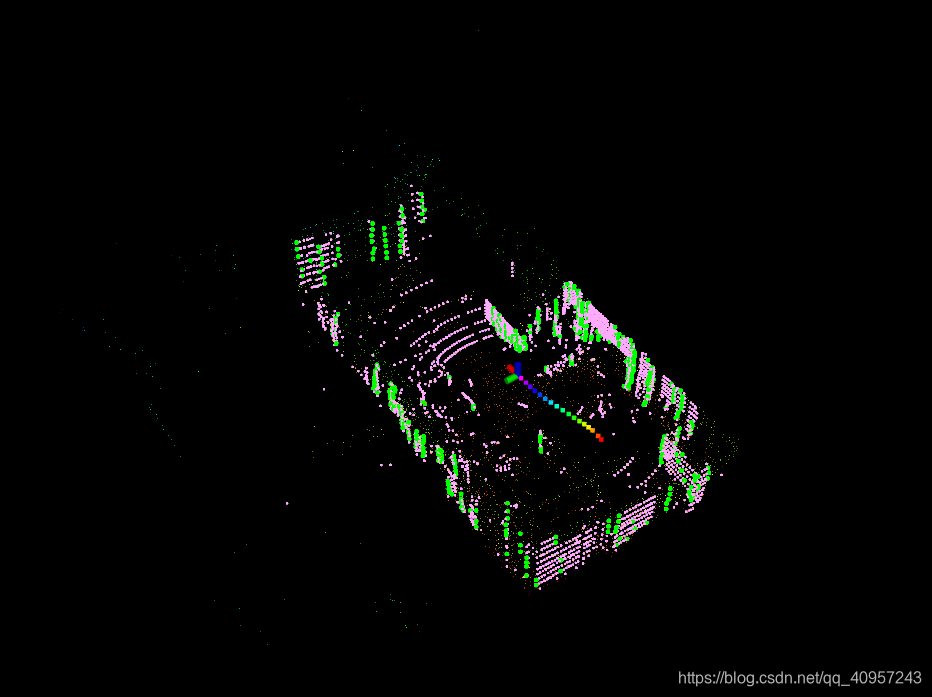
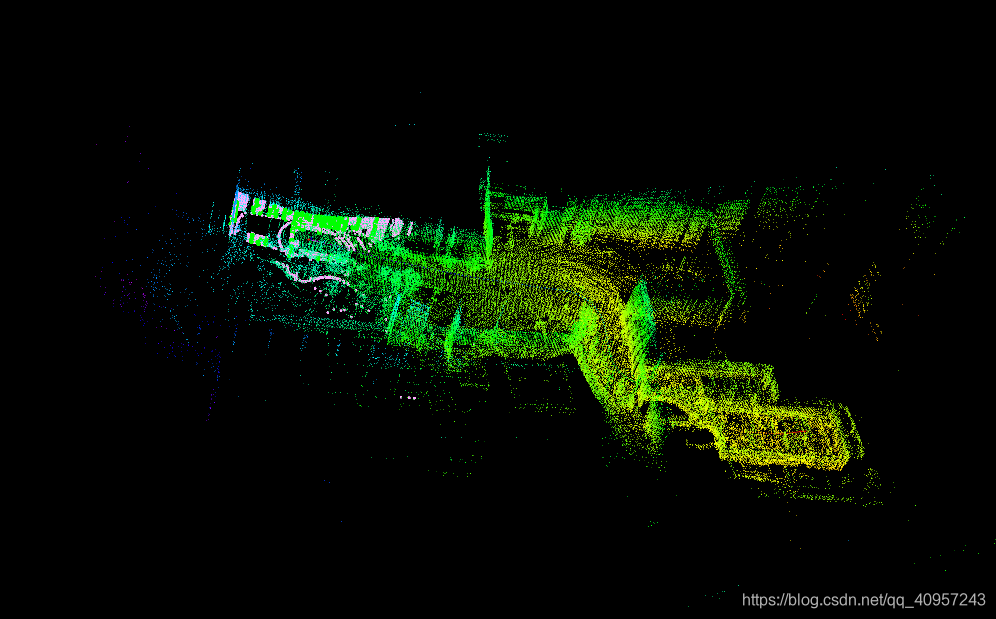
1.2 lego-loam运行
roslaunch lego_loam run.launch
rosbag play *.bag --clock --topic /velodyne_points /imu/data
运行结果
该数据中仅仅采用激光雷达数据(nsh_indoor_outdoor.bag)














 621
621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









