







mac python实现CH340串口通信
串口通信介绍
-
基本概念
串口通信(Serial Communication), 是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式。 -
UART
UART全称为Universal Asynchronous Receiver/Transmitter,通用异步收发传输器。UART一般用于电路板内部通信或者短距离通信,最常用的就是单片机,stm32等。UART通信是两个IC(integrated circuit)进行数据通信的方式,其中一方的TX负责发送数据给对方的RX,一方的RX负责接收对方发送的数据.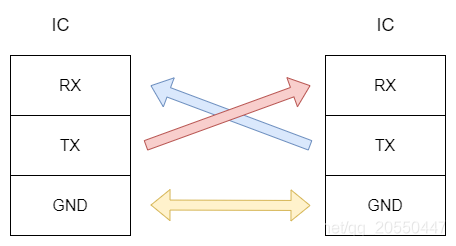
理论上,我们的驱动板和树莓派通信,要求两个电路板上都需要有UART通信接口。但是树莓派是不存在uart接口的,只能用usb,因此,在开发版上,集成了ch340,可以和树莓派进行通信。
烧录程序
- mac没有找到串口烧录的界面化软件,为了方便我在我windows虚拟机上装了FlyMcu,进行烧录
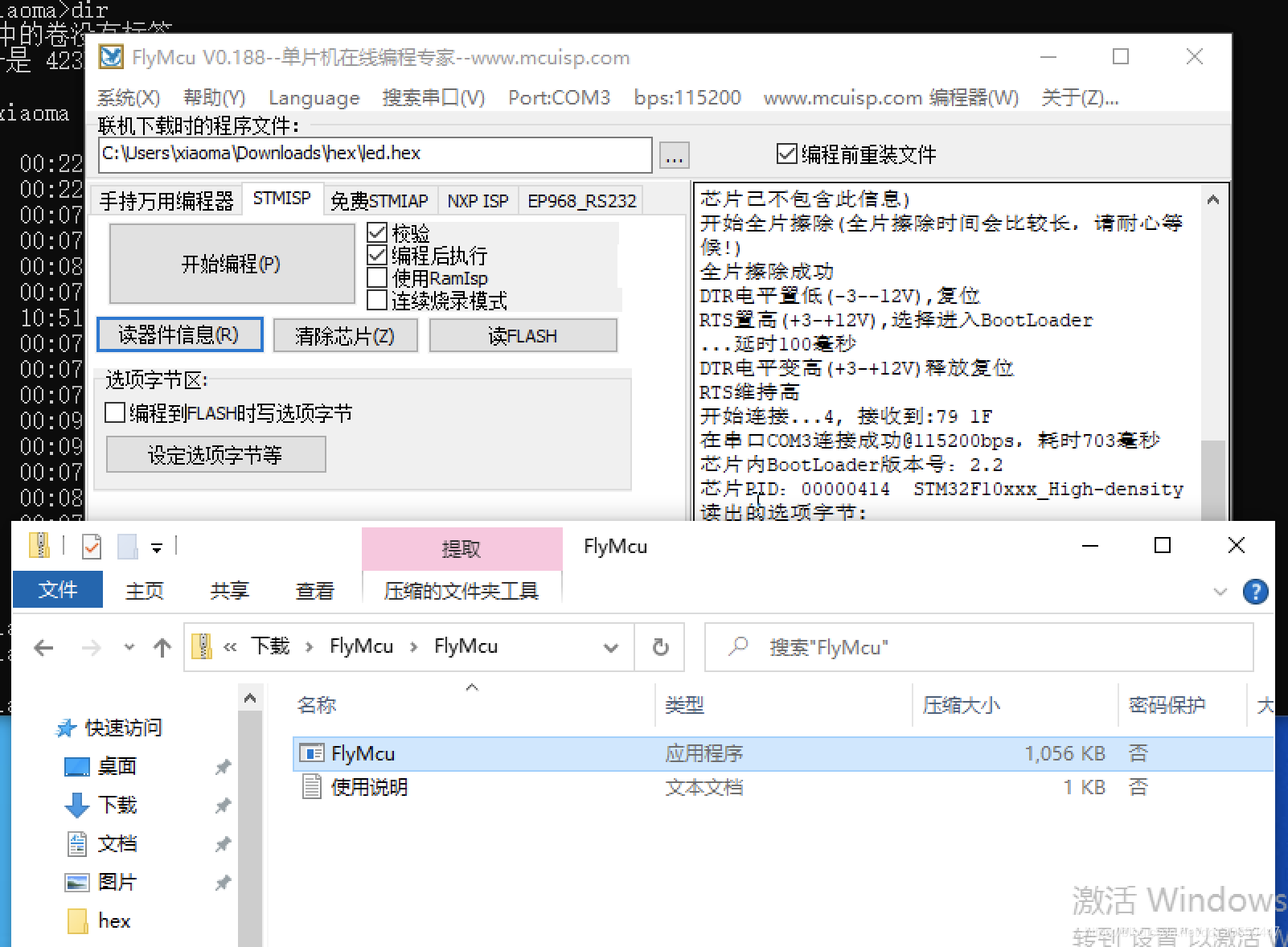
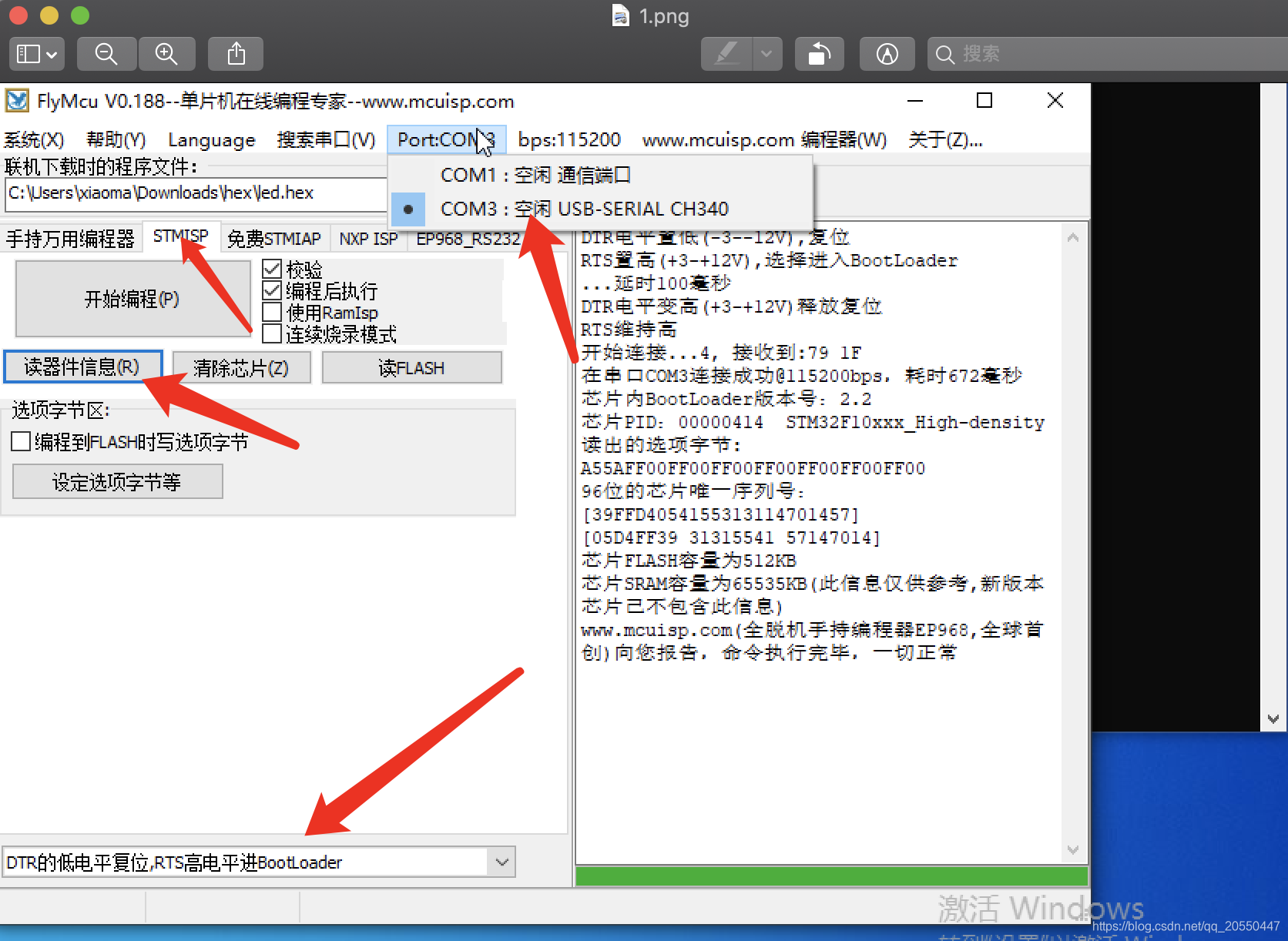
- 连接usb后,选择port: USB SERIAL CH340,选中STMISP,配置 校验和编程后执行,取消选中 编程到FLASH时写选项字节,下拉框选择 DTR的低电平复位,RTS高电平进BootLoader。然后读器件信息,如果连接正常右边会有信息提示。
3.选择编写好的hex文件,然后点击开始编程,右边显示烧录进度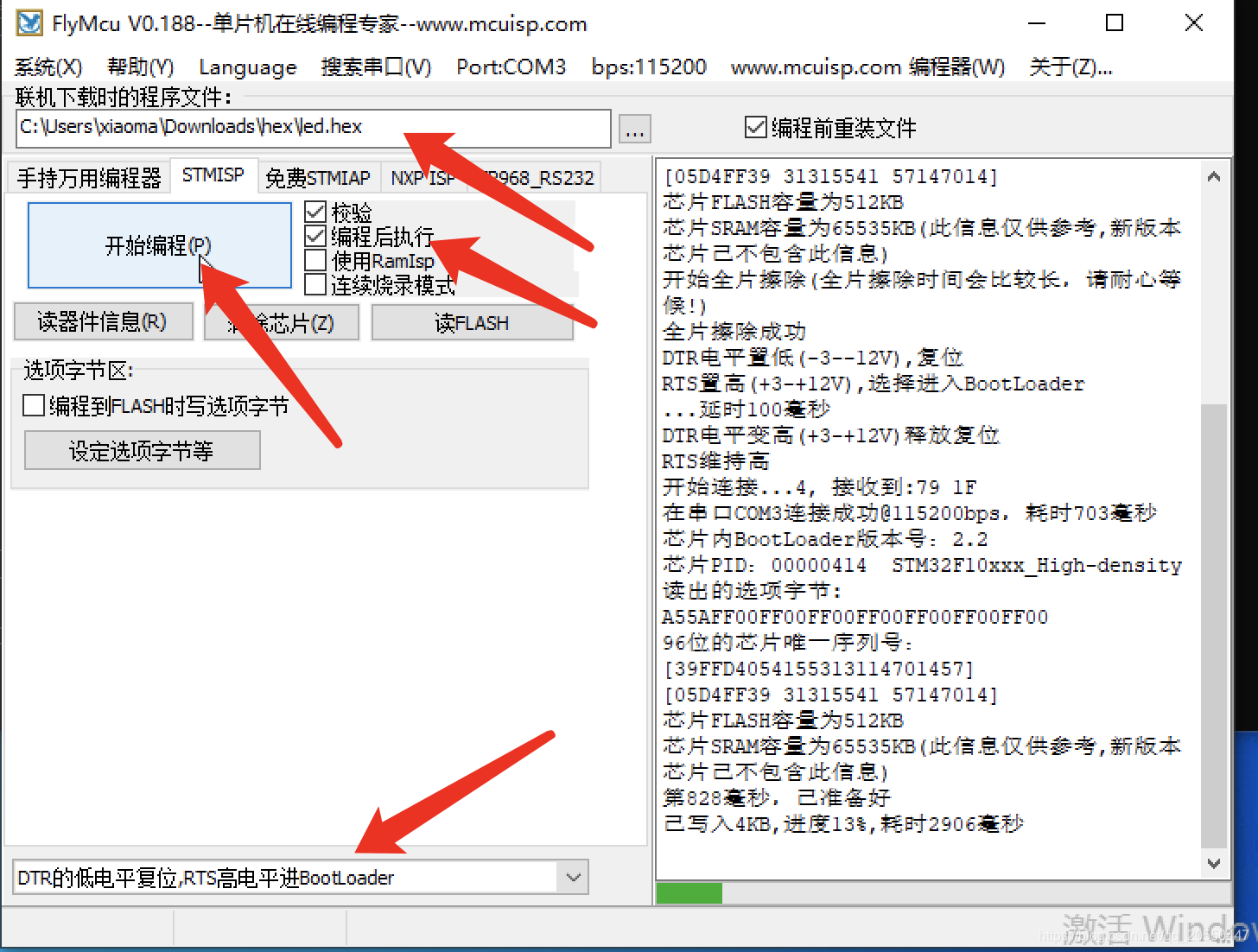
4.烧录完成
代码实现串口通信
- 安装pyserial库,pip install pyserial.
第一个参数是使用USB连接串行口(cd /dev/ 然后 ls -al ttyUSB0 可以获取到),第二个参数是波特率
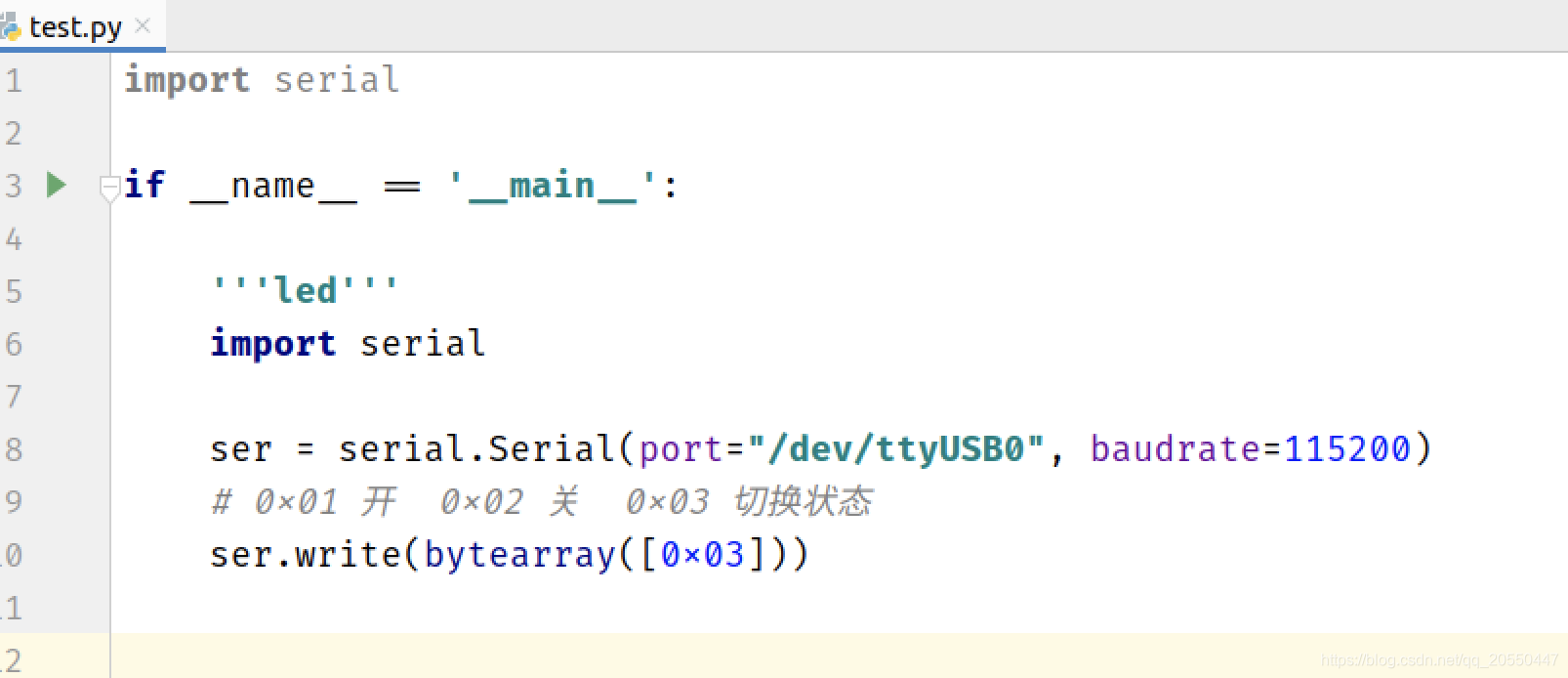
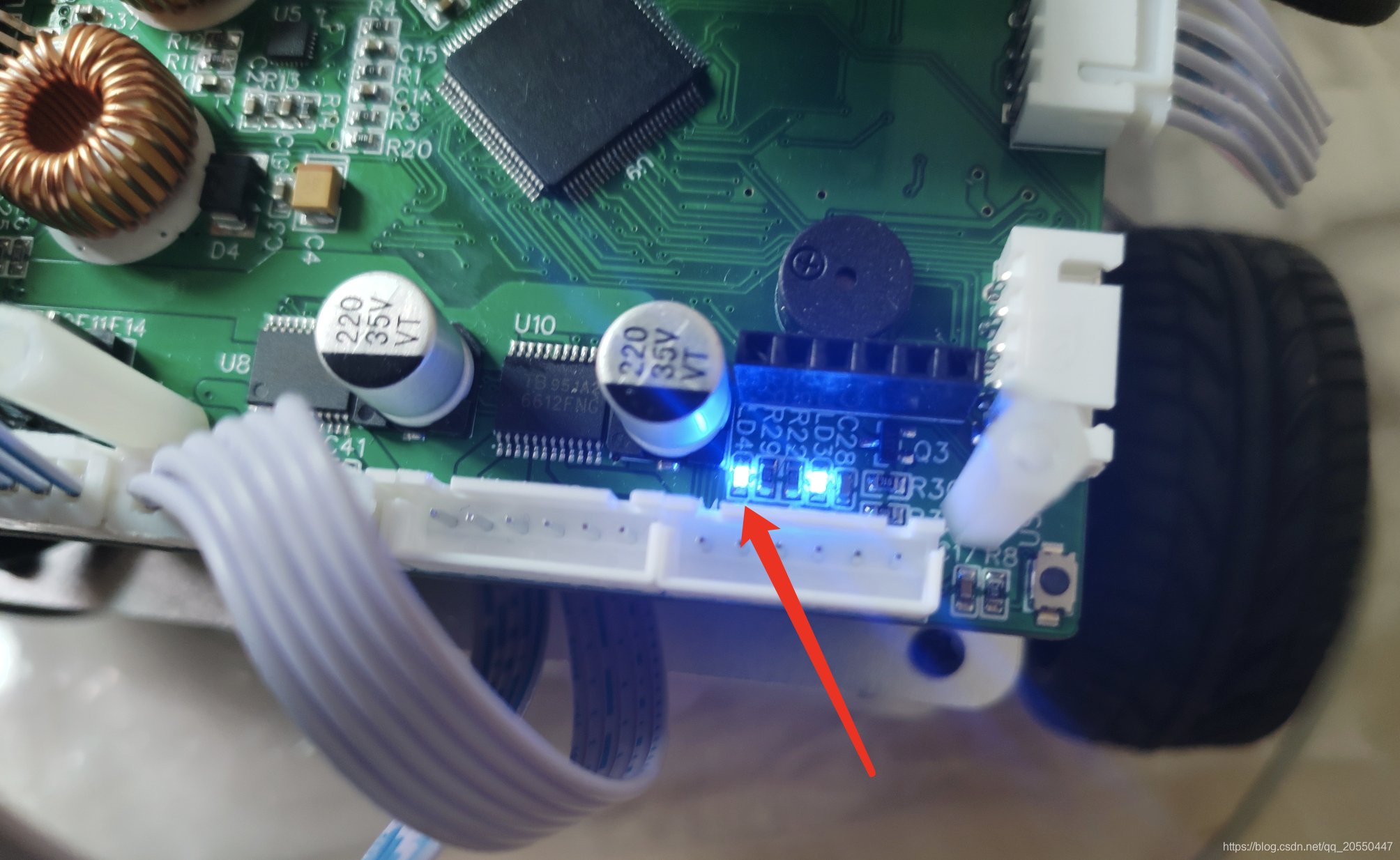
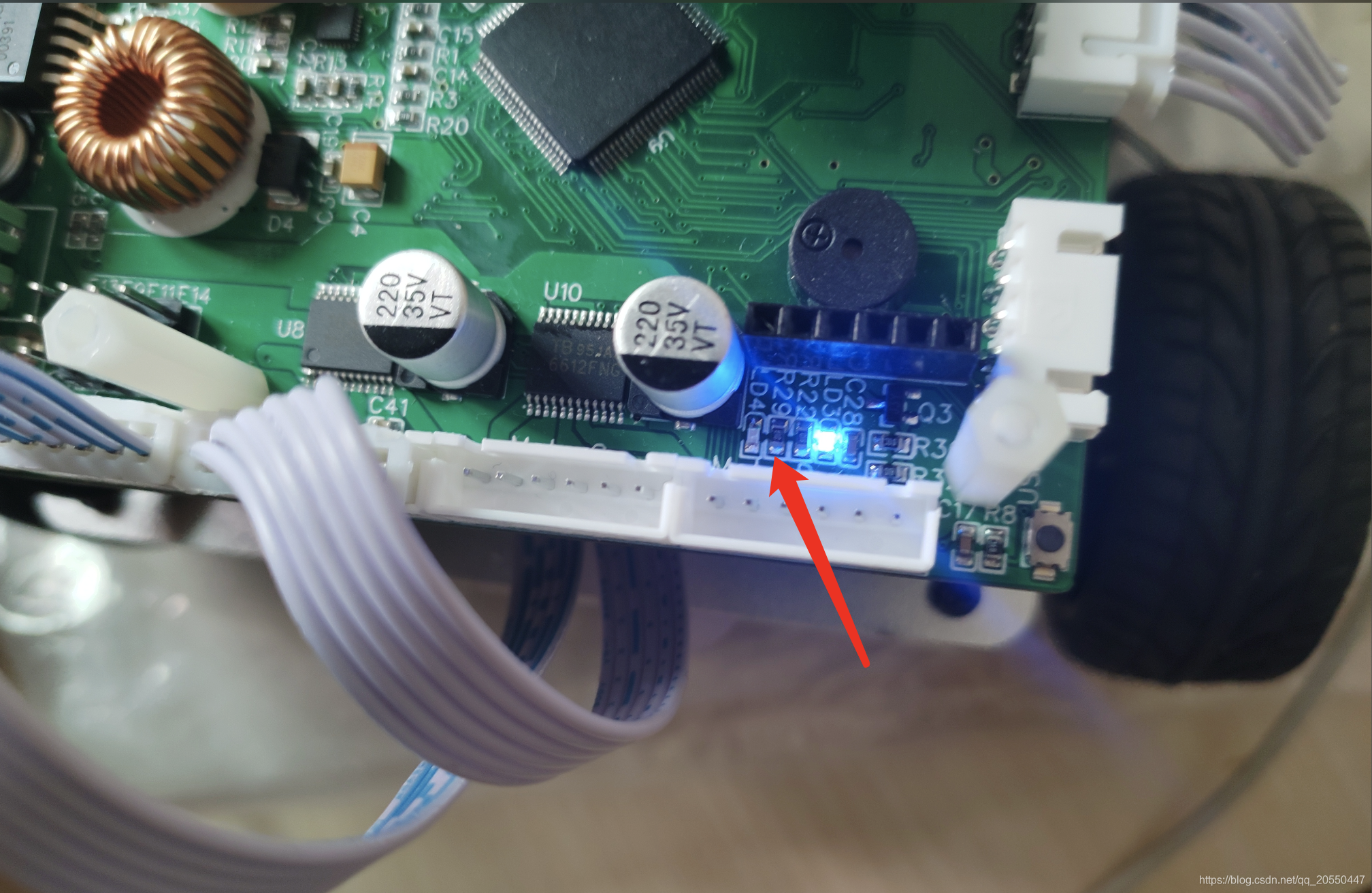
- 运行代码查看led灯变亮了,然后再次运行切换下状态,这时候就会灭掉














 1196
1196











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









