









在建立数学模型后,控制系统下一步是使用未来控制信号作为可调变量来计算预测输出。
首先,我们将当前时间记为ki,优化窗口的长度记为Np,作为样本数。为简单起见,我们首先考虑单输入单输出的情况,然后将结果扩展到多输入多输出。
假设ki为采样时刻,ki>0。这里我们先讨论状态变量矢量x(ki)可以通过测量获得这种情况,x(ki)能提供当前状态信息。
未来控制轨迹表示为:
Δu(ki),Δu(ki+1),Δu(ki+2),…,Δu(ki+Nc-1)
其中Nc成为控制范围,用于捕捉未来控制轨迹参数数量。利用给定的x(ki),可以预测Np个样本的未来状态变量,这里Np称为预测范围,同时Np也是优化窗口的长度。
未来状态变量表示为:
x(ki+1|ki),x(ki+2|ki),…,x(ki+m|ki),…,x(ki+Np|ki)
这里的x(ki+m|ki)是在当前给定状态变量ki的ki+m处的预测状态变量,这里规定Nc<=Np(即控制范围<=预测范围)
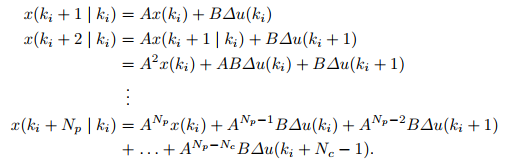
基于之前的状态-空间模型(A,B,C),使用一组未来控制参数按序计算将来的状态变量。式子1如下:
通过预测状态变量,经变换可得到预测输出变量,式子2如下: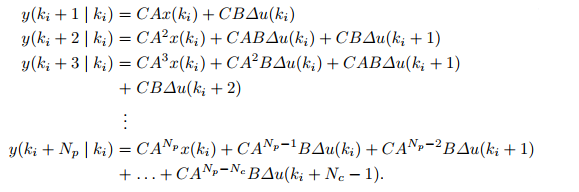
注意现在所有预测输出变量都是根据当前状态变量信息x(ki)及未来控制轨迹Δu(ki+j)表示,其中(j=0,1,2…Nc-1)。
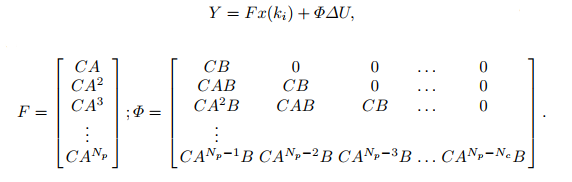
接下来我们将1式和2式用矩阵形式表达。
定义矩阵:















 4352
4352











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









