









优化目标:
我们的预测系统的目标是使系统的预测输出尽可能的接近设定点的信号,因此我们只要将两者的误差控制在最小。
假设在整个预测范围内设定点的信号矩阵为:
将反应控制目标的成本函数定义为:

其中第一项与设定点信号和预测输出误差最小目标有关,第二项反映了成本函数尽可能小对未来控制轨迹ΔU的影响。
对角矩阵如下:

其中rw=0时,我们不再考虑ΔU对J函数的影响,若rw>0,则有必要将ΔU纳入考虑之中。
求成本函数J最小值
接下来我们解决如何求成本函数J的最小值。
将上讲(MPC初学2(状态及输出变量预测)添加链接描述)中预测输出变量Y代入J函数得

J函数对ΔU求一阶导得:

求最小值的必要条件时一阶导函数为零,移项得:

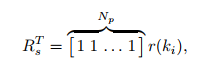
其中该矩阵称为Hessian 矩阵,Rs为数据矩阵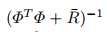
Rs有如下关系:
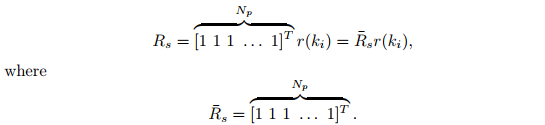
最终控制信号的最优解是关于设定点信号和状态变量的表达式,如下:
















 2206
2206











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









