






课设舵机狗总结文系列文章目录
这里罗列了系列文章链接
总述
机械部分
课设舵机狗总结文——Solidworks舵机狗机械结构设计方案
F4控制部分
课设舵机狗总结文——CubeMX+STM32F4+FreeRTOS+USART1实现蓝牙控制
工程文件参考——STM32F4+HAL+USART2+幻尔LSC舵机控制板
待补充
前言
本文主要讲解项目模型的构建方法,在csdn上讲解solidworks模型设计,希望审核不要打我。
结构主要涉及到3D打印、钣金件以及碳纤维管。
舵机选择了SPT5632-180,32kg数字舵机。
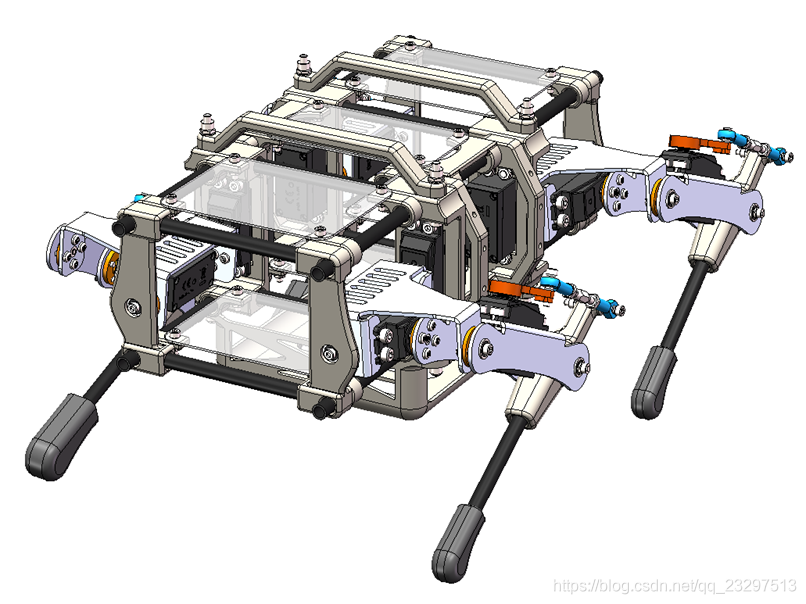
一、效果展示
完整结构。
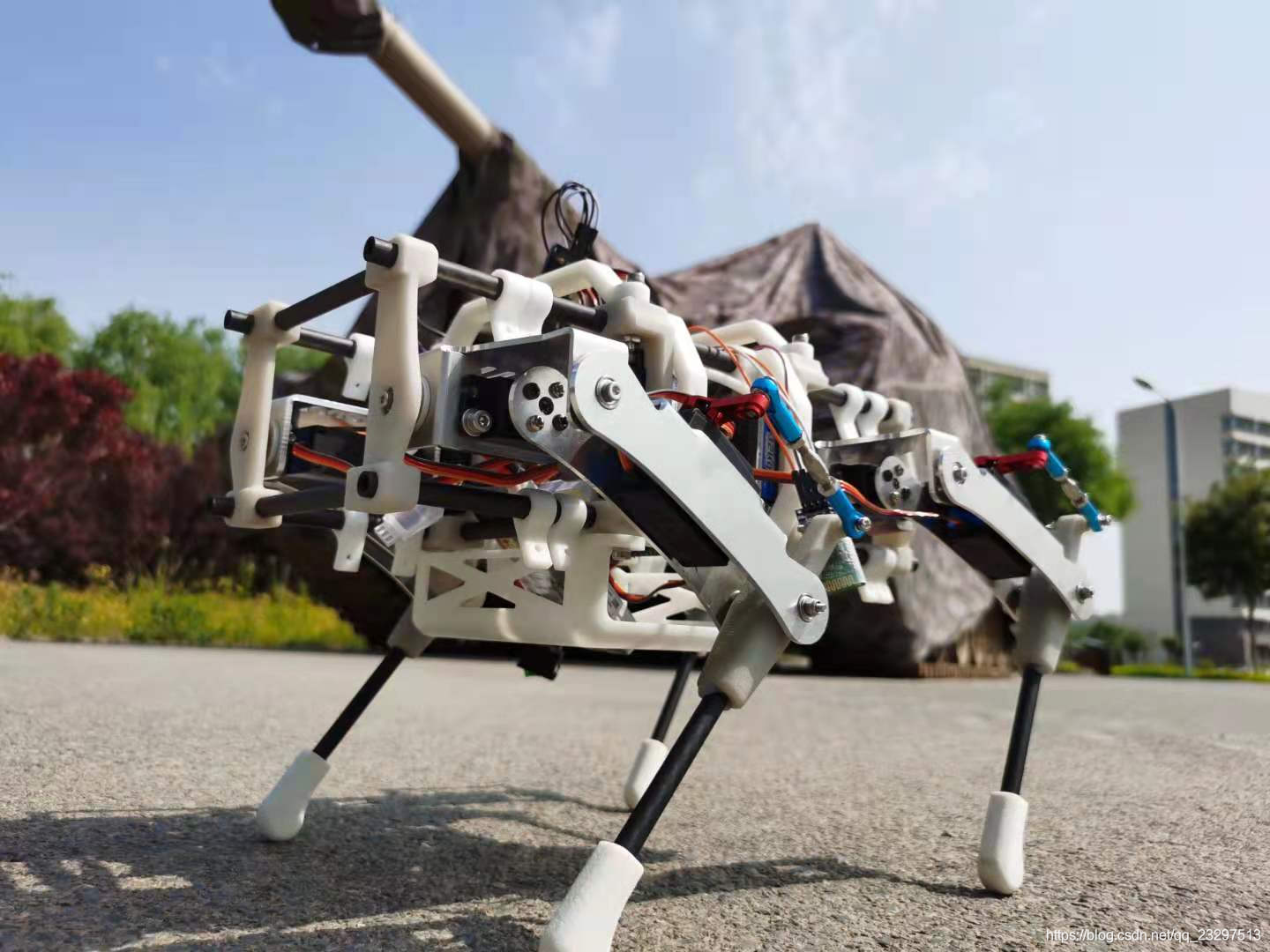
模型效果图。
二、布局规划
模型设计的首要工作是对整体结构的尺寸规划。参考我们所选型的舵机尺寸以及预期结构大小,所设计结构身长控制在300mm左右。最终所构建各关键尺寸如下表
| 关节名称 | 尺寸 |
|---|---|
| 躯干长度 | 300 |
| 躯干宽度 | 128 |
| 躯干高度 | 88 |
| 左右腿间距 | 114 |
| 前后腿间距 | 210 |
| 外摆 | 50 |
| 大腿 | 130 |
| 小腿 | 124 |
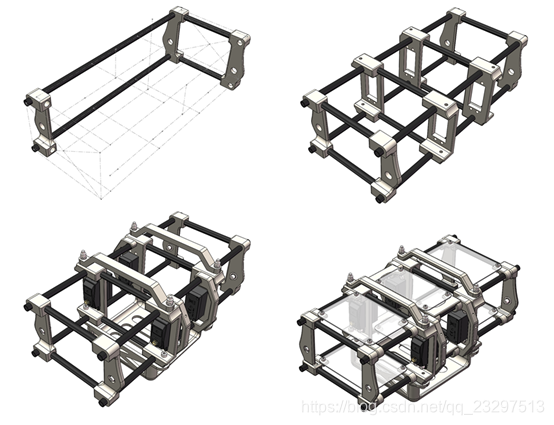
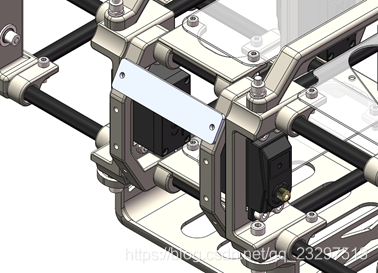
三、躯干设计
首先构建躯干结构,依赖自上而下建模。主体结构由碳纤维和玻纤尼龙材质3D打印件组成,构建尺寸在300 * 128 * 88 mm^3的躯干框架,具有足够的机械强度,能够抵抗机械狗整体将会遭遇的各种冲击。
此外机体上下安装底仓与提手,提手可以方便机体携带,底仓提供116 * 121 * 50 mm^3的空间,笔者推荐适用于电池的安放。
结构内部腔体主要分为三个腔室,前中后腔室分别可以提供74 * 90 * 112 mm^3的空间,并提供结构组装端口。
此外为了提高系统拓展性,增设多模块安装平台一共拓展功能实现。
其实就是在碳纤维管上增设平台,方便模块组装,可以直接安装亚克力板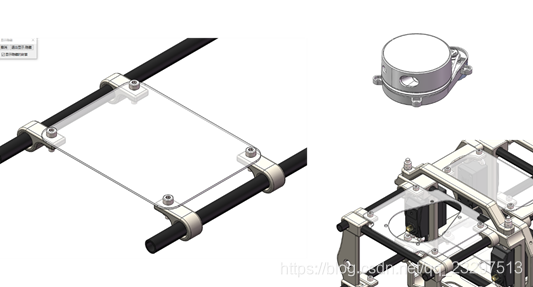
侧板同理,可以安装开关或者显示屏
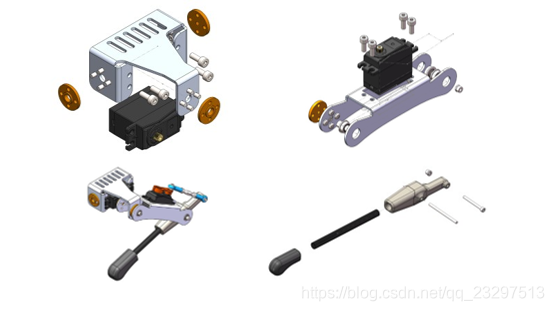
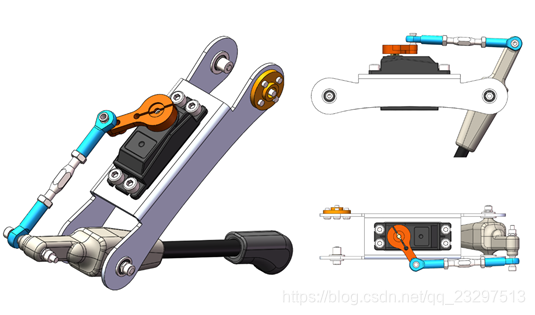
四、腿部设计
单个腿部机构由三个舵机驱动,分别为第一关节——外摆、第二关节——大腿、第三关节——小腿三个部件。
躯干部分包含一个舵机对肩关节角度进行控制,依赖舵盘与肩关节钣金件进行连结。
第一关节外摆由钣金件构成,依赖舵盘以及其他组件与其他关节相连。
第二关节大腿同样由钣金件构成,依赖舵盘以及其他组件与其他关节相连。
第三关节小腿由尼龙玻纤打印件、碳纤维管、橡胶打印件组合而成。
最终腿部结构组装如左下图所示。
五、硬件选型
待补充
六、装配须知
待补充
附
结构设计思路大致如此,相关模型素材我保存在了百度网盘中,需要参考的同学可以自行取出阅读
链接:https://pan.baidu.com/s/1OV2To8-hAVIMtggQRlnnNQ
提取码:jdhg
文章更新日志
| 日期 | 内容 |
|---|---|
| 2021/06/24 | 初版发布 |

















 991
991

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









