







学习资料来源
http://www.360doc.com/content/16/0812/18/7821691_582768083.shtml
定义
Unified Robot Description Format,统一机器人描述格式,简称为URDF。ROS中的urdf功能包包含一个URDF的C++解析器,URDF文件使用XML格式描述机器人模型。
格式
具体参见
http://wiki.ros.org/urdf/XML
节点描述如下
1、sensor/proposals
Describes a sensor, such as a camera, ray sensor, etc
描述了一个传感器,如相机、光线传感器等
2、link
Describes the kinematic and dynamic properties of a link.
描述一个链接的动态和动态属性。
3、transmission
Transmissions link actuators to joints and represents their mechanical coupling
变速器将执行器连接到接头并表示它们的机械耦合
4、joint
Describes the kinematic and dynamic properties of a joint.
介绍了关节的运动学和动力学特性。
5、gazebo
Describes simulation properties, such as damping, friction, etc
描述仿真属性,如阻尼、摩擦等
6、sensor
Describes a sensor, such as a camera, ray sensor, etc
描述了一个传感器,如相机、光线传感器等
7、model_state
Describes the state of a model at a certain time
在一定时间内描述模型的状态
8、model
Describes the kinematic and dynamic properties of a robot structure.
描述了机器人结构的运动学和动力学特性。
语法检查工具
ROS提供了一个工具来检查我们UDRF的正确性。首先获取我们的工具。
sudo apt-get install liburdfdom-tools
安装完毕后,执行检查
check_urdf my_robot.urdf
如果一切正常,将会有如下显示:
robot name is: test_robot
———- Successfully Parsed XML —————
root Link: link1 has 2 child(ren)
child(1): link2
child(2): link3
child(1): link4
语法格式正式开讲
一个小Demo
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
</joint>
</robot>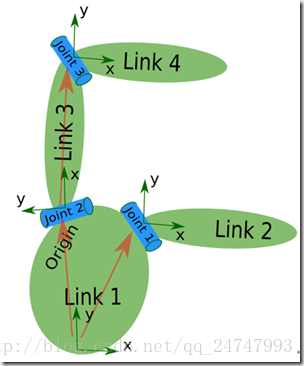
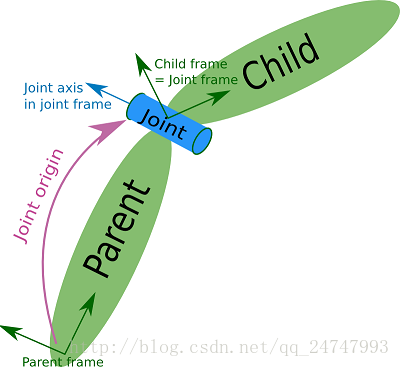
按照骨骼动画进行了解,Link表示的是骨骼,Joint表示的是关节,骨骼在关节的作用下回体现出父子关系。
Joint的描述
origin
在基础模型之上,我们为机器人添加尺寸大小。由于每个环节的参考系都位于该环节的底部,关节也是如此,所以在表示尺寸大小时,只需要描述其相对于连接的关节的相对位置关系即可。URDF中的域就是用来表示这种相对关系。
例如,joint2相对于连接的link1在x轴和y轴都有相对位移,而且在x轴上还有90度的旋转变换,所以表示成<origin>域的参数就如下所示:
<origin xyz="-2 5 0" rpy="0 0 1.57" />没看懂,具体数字对应不起来
axis
如果我们为机器人的关节添加旋转轴参数,那么该机器人模型就可以具备基本的运动学参数。
例如,joint2围绕正y轴旋转,可以表示成:
<axis xyz="0 1 0" />axis旋转起来的坐标系应该是什么样子的呢
最后我们生成了一个相对复杂的UDRF,看是否能理解
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="5 3 0" rpy="0 0 0" />
<axis xyz="-0.9 0.15 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-2 5 0" rpy="0 0 1.57" />
<axis xyz="-0.707 0.707 0" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="5 0 0" rpy="0 0 -1.57" />
<axis xyz="0.707 -0.707 0" />
</joint>
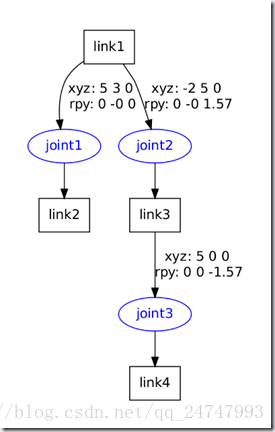
</robot>图形化显示UDRF
ROS提供了工具可以进行图形化显示
urdf_to_graphiz my_robot.urdf
生成后的结果变成

















 1985
1985

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









