






安装过程可以参考:ROS 乐视三合一深度相机 配置_Myliuxuwei的博客-CSDN博客_乐视深度相机
编译时:报错
CMake Error at ros_astra_camera/CMakeLists.txt:211 (add_library):
Target "libuvc_camera_nodelet" links to target "LibUVC::UVCShared" but the
target was not found. Perhaps a find_package() call is missing for an
IMPORTED target, or an ALIAS target is missing?
CMake Error at ros_astra_camera/CMakeLists.txt:197 (add_executable):
Target "camera_node" links to target "LibUVC::UVCShared" but the target was
not found. Perhaps a find_package() call is missing for an IMPORTED
target, or an ALIAS target is missing?
根据定位:CMakeLists.txt文件211行和197行报错
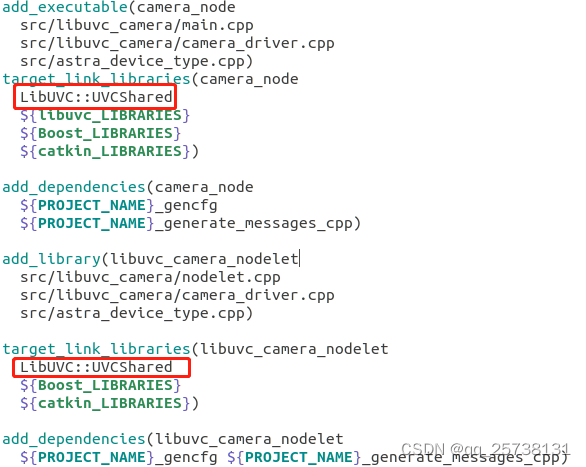
将两段代码修改成:
${libuvc_LIBRARIES}第一段的可以直接删掉,第二段修改成${libuvc_LIBRARIES}。
重新编译如果还是报错:需要检查一下catkin_ws/src/ros_astra_cxamera/include/openni2_redist/x64/libOpenNI2.so文件是否完整,我之前直接虚拟机 直接 git clone ,不知道是不是网络原因,这个文件大小只有100多b,正常大小应改为 498.4KB。
问题解决














 1595
1595











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









