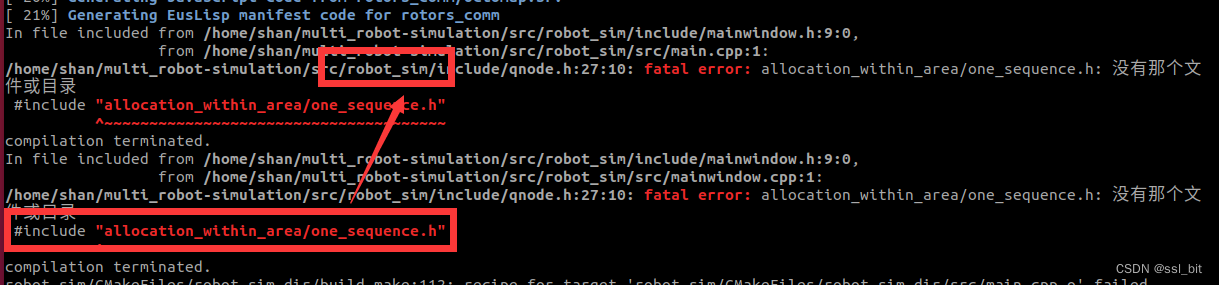
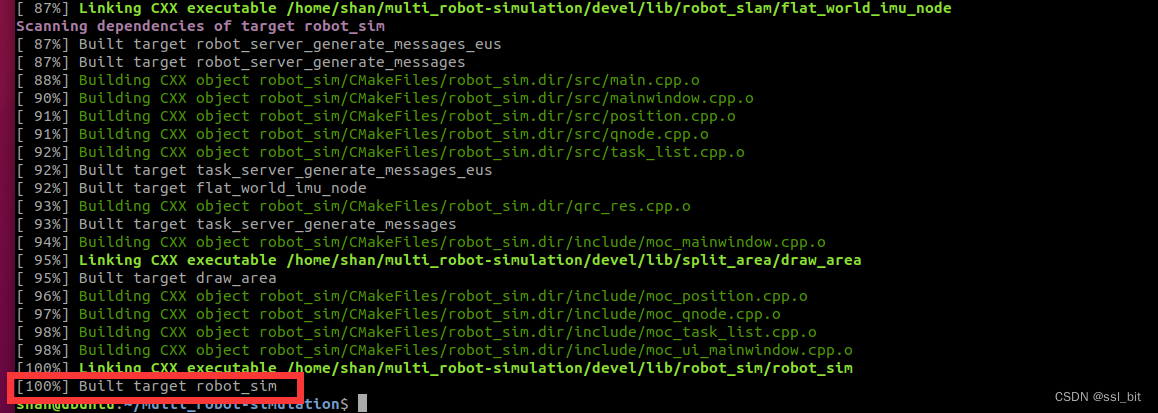
实现ros编译依赖顺序 图中robot_sim包依赖于allocation_within_area包,但是编译顺序错误导致报错。 需要在robot_sim包中进行如下设置 set(TARGET_NAME xxxx项目名称XXX) # 之后在文件后添加这两句,注意前后顺序: add_executable(${TARGET_NAME}) add_dependencies(${TARGET_NAME} ${catkin_EXPORTED_TARGETS}) 之后robot_sim功能包就会在allocation_within_area之后编译,可以使项目顺利编译完成。 一次成功~





















 3547
3547











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






