







在当今科技飞速发展的时代,四足机器人作为仿生机器人领域的杰出代表,正逐渐走进大众视野,凭借其独特的设计与卓越的性能,在多个领域展现出巨大的应用潜力。
四足机器人巧妙借鉴了动物(如狗、猫、马等)的四肢结构和行走方式,通过精妙复杂的机械构造与精准的控制算法,配合多种类型的传感器、驱动器以及控制系统,具备了强大的环境适应能力,能够在复杂多样的地形中稳定行进并高效执行各类任务。从外观形态上,主要可分为类机器狗、类机器猫、类机器狼等;依据传动技术差异,则可细分为液压传动、电机传动、气动驱动三种类型;
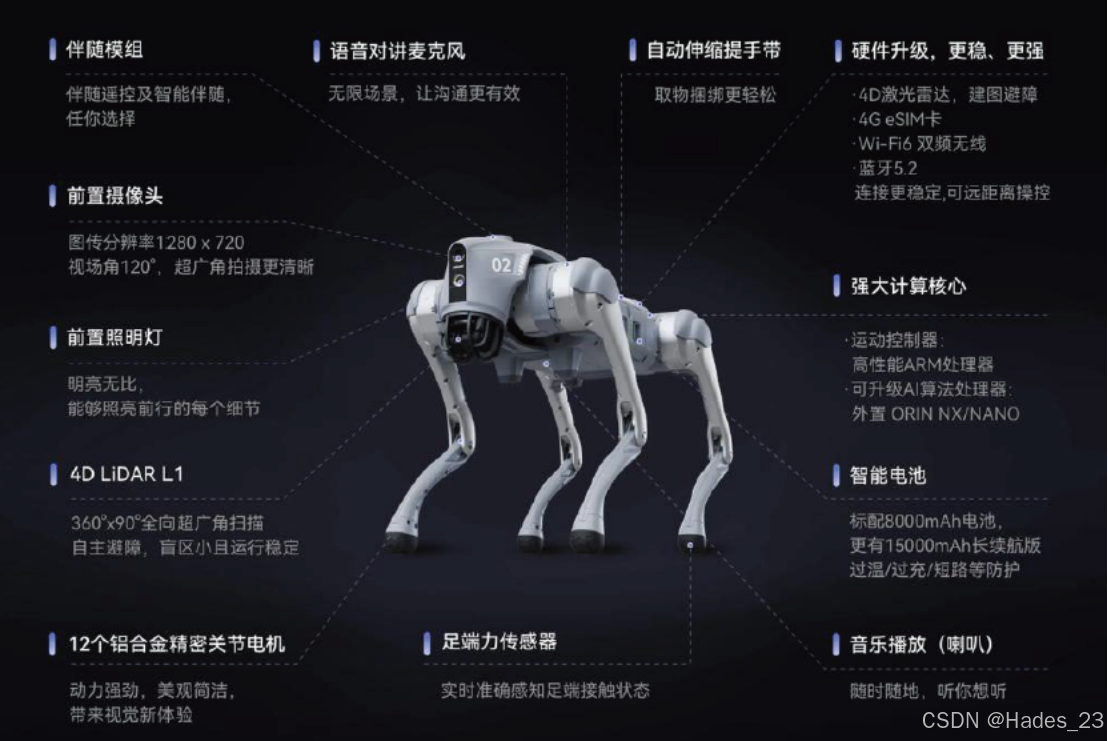
宇树科技四足机器人
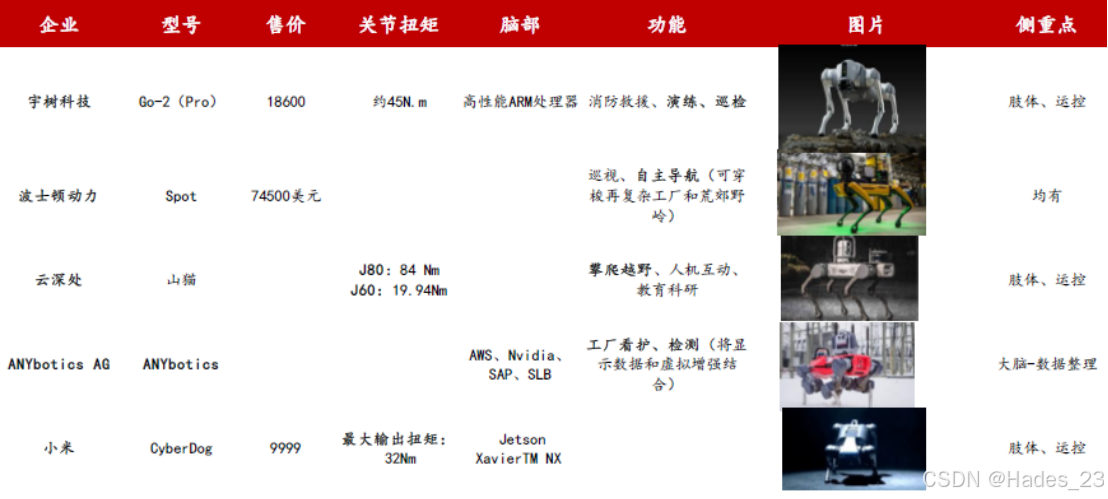
官液压传动方式能够实现高功率密度,为机器人提供强劲的驱动力和扭矩,但高昂的成本限制了其大规模应用,这也是早期波士顿动力产品价格昂贵的主要原因。随着技术的发展,自 2015 年起,越来越多的四足机器人开始采用电机传动。电机传动不仅运动灵活,而且成本相对较低,未来极有可能成为四足机器人的主流传动方式。至于气动驱动,虽然成本低廉、设计轻巧,却在高精度控制和低能耗方面存在一定短板。目前,主流的四足机器人机型,如宇树科技、波士顿动力、云深处、ANYbotics、小米的机器狗,大多采用电驱方式。不同品牌的产品在功能侧重点和价格上差异显著,例如小米机器狗售价 9999 元,而波士顿动力新型电机驱动四足机器人售价高达 7 - 8 万美元;宇树、小米等国产机器狗侧重于运动控制,海外的 ANYbotics 则更注重大数据整理与整合。
当前主流四足机器人机型的主要信息
四足机器人主要由机械结构、驱动系统、传感系统和控制系统这四个核心部分组成。机械结构是机器人的物理基础,如同动物的骨骼,支撑并决定其运动形态;驱动系统提供动力,类似于动物的肌肉;传感系统负责感知周围环境信息,就像动物的感官;控制系统则如同大脑,协调各部分协同工作,使机器人能够做出精准的决策和动作。
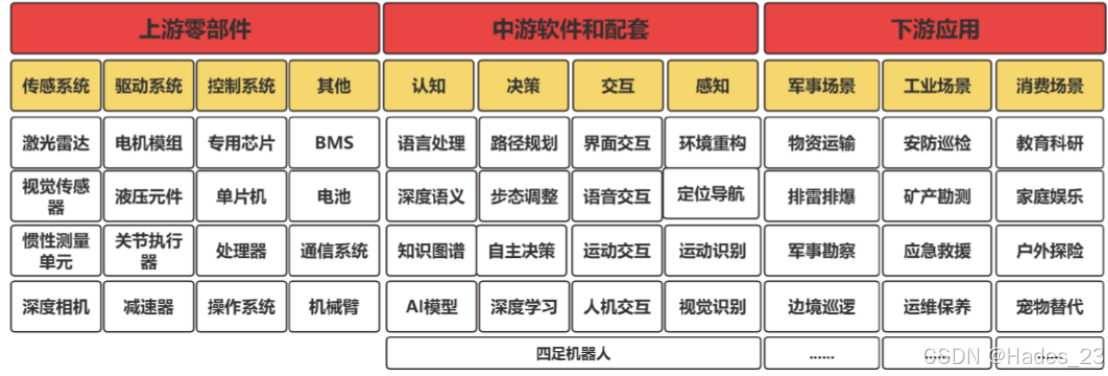
四足机器人的应用领域广泛,涵盖军事、工业、消费三大板块。在军事领域,其卓越的越障能力使其在复杂地形的军事勘察、危险区域的排雷排爆等任务中发挥着不可替代的作用。在工业方面,尽管目前市场应用占比相对较低,但在巡检、消防等场景中已初露锋芒,展现出提高工作效率、保障人员安全的优势。近年来,四足机器人的应用逐渐向消费级领域拓展,在教育科研、家庭娱乐等场景中为人们带来全新体验,满足了人们对新奇科技产品的需求。
四足机器人产业链
资料来源: GGII
四足机器人行业情况
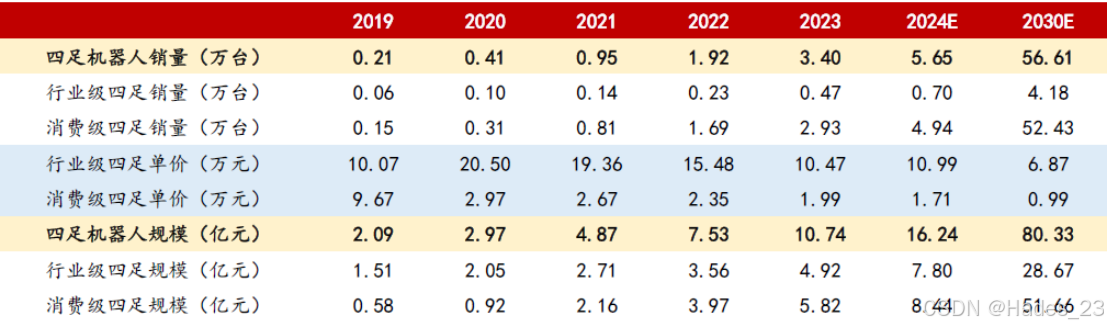
根据高工机器人,后续消费级四足机器人快速提升。2023年全球四足机器人市场销量约3.40万台,同比增长76.86%。
2023年全球四足机器人市场规模10.74亿元,同比增长42.95%。到2030年全球四足机器人销量有望超56万台,
2024-2030年销量复合增长率超过45%。到2030年全球四足机器人市场规模有望超过80亿元,2024-2030年市场规模复合增长率超过30%。
全球四足机器人市场规模预测
资料来源: GGII
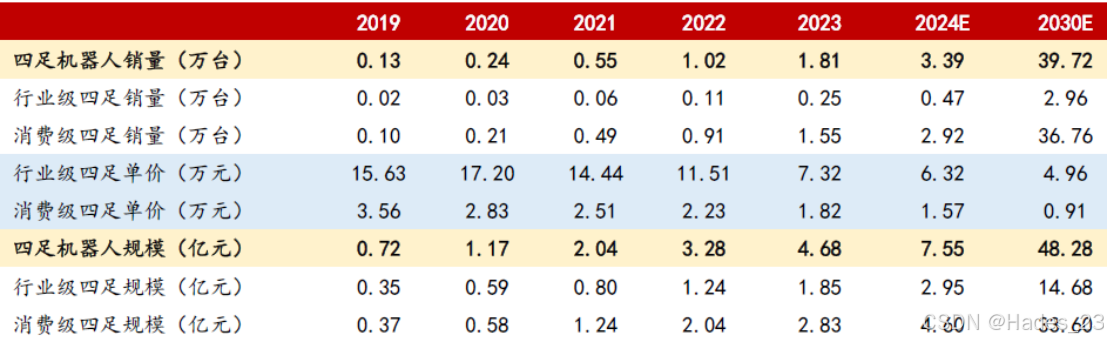
从市场数据来看,四足机器人行业呈现出蓬勃发展的态势。2023 年,全球四足机器人市场销量约 3.40 万台,同比增长 76.86%,市场规模达到 10.74 亿元,同比增长 42.95%。预计到 2030 年,全球销量有望突破 56 万台,2024 - 2030 年销量复合增长率超过 45%;市场规模有望超过 80 亿元,2024 - 2030 年市场规模复合增长率超过 30%。在中国市场,2023 年四足机器人销量约 1.8 万台,同比增长 76.92%,市场规模为 4.68 亿元,同比增长 42.68%。预计到 2030 年,销量将接近 40 万台,2024 - 2030 年复合增长率超过 50%;市场规模有望超过 48 亿元,2024 - 2030 年复合增长率超过 35%。
国内四足机器人市场规模预测
资料来源: GGII
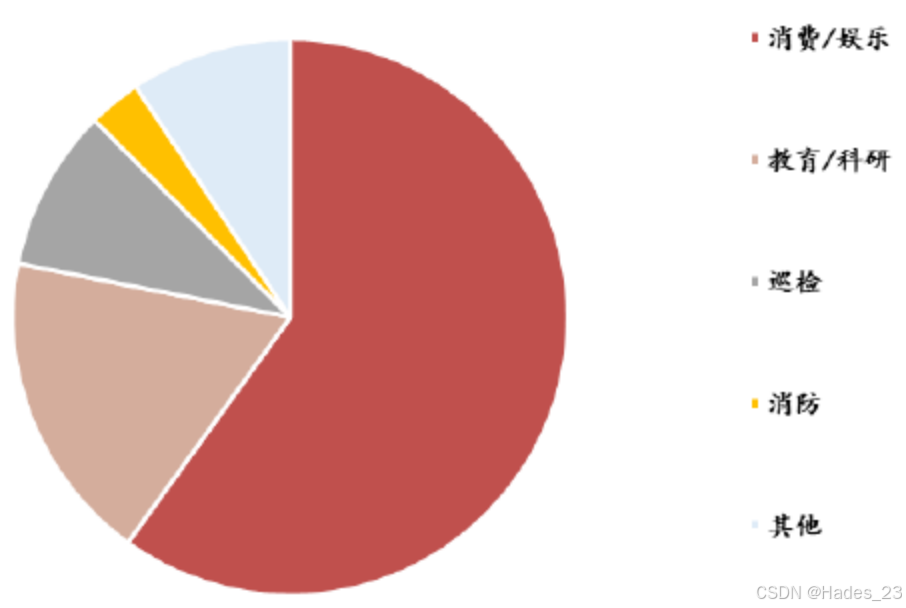
2023年中国四足机器人下游应用行业分布(销量)
2023年中国四足机器人下游应用行业分布(规模)
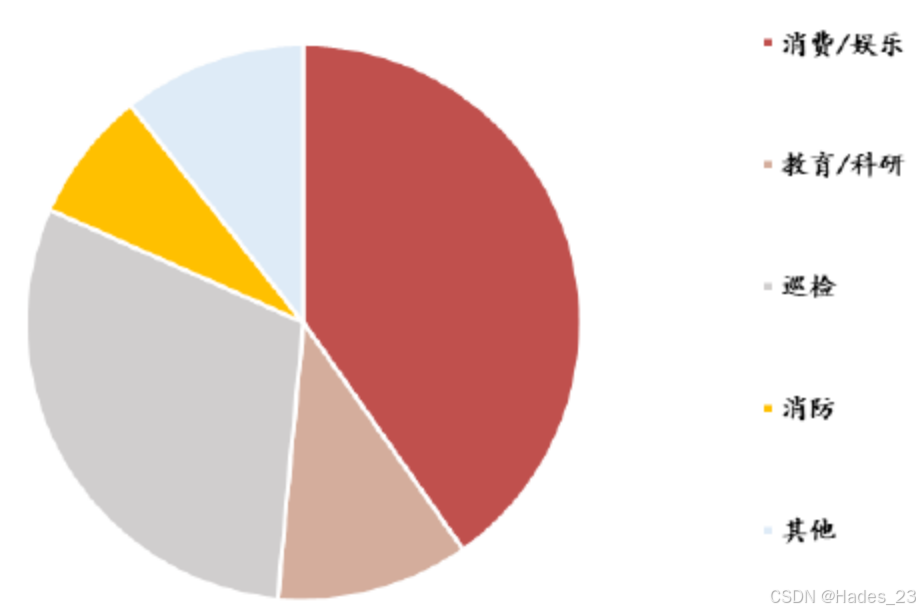
资料来源: GGII
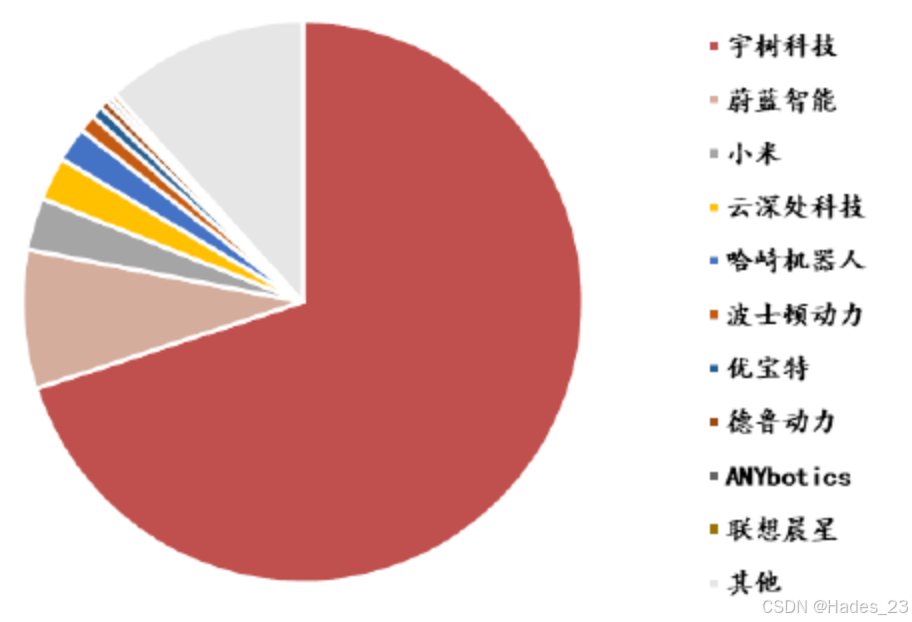
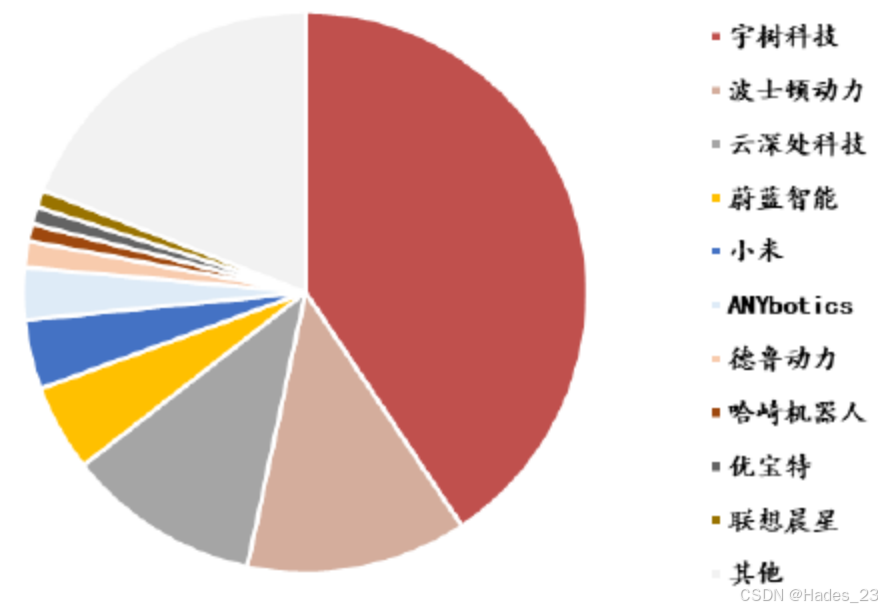
在市场竞争格局方面,从出货量来看,宇树科技、蔚蓝智能、小米位列前三,占比分别为 69.75%、8.05%、2.98%。从企业营收规模来看,宇树科技、波士顿动力和云深处科技在全球四足机器人市场中占据领先地位,2023 年营收占比分别为 40.65%、12.67% 和 11.11% 。
全球四足机器人销售份额预测
全球四足机器人市场规模预测
资料来源: GGII
总体而言,四足机器人作为智能科技领域的创新成果,其发展前景十分广阔。随着技术的不断进步与完善,未来它将在更多领域发挥重要作用,为人们的生活和工作带来更多便利与惊喜。但同时,行业也面临着进一步降低成本、提升技术性能、规范市场等挑战,只有克服这些困难,才能实现四足机器人行业的可持续发展。

















 1311
1311

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









