







论文阅读《LiDAR Iris for Loop-Closure Detection》(IROS 2020 Oral)
代码已开源: https://github.com/JoestarK/LiDAR-Iris
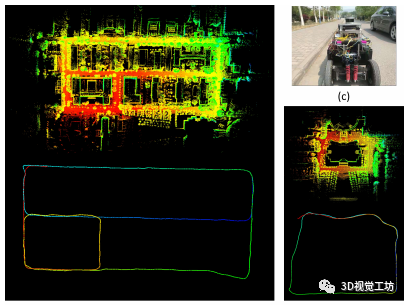
IRIS是一个实验性能比ScanContext更好的开源的激光雷达全局描述子,下图是作者通过自制的VLP-16数据集验证IRIS的回环效果。
IRIS起名来自虹膜。虹膜区域内的每个点通常会通过道格曼橡胶板模型映射为一对极坐标,激光雷达的点云同样也可以被映射为极坐标的表示。
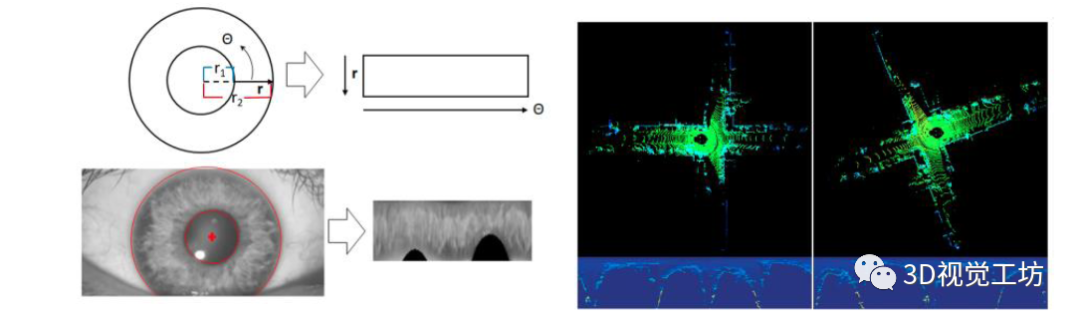
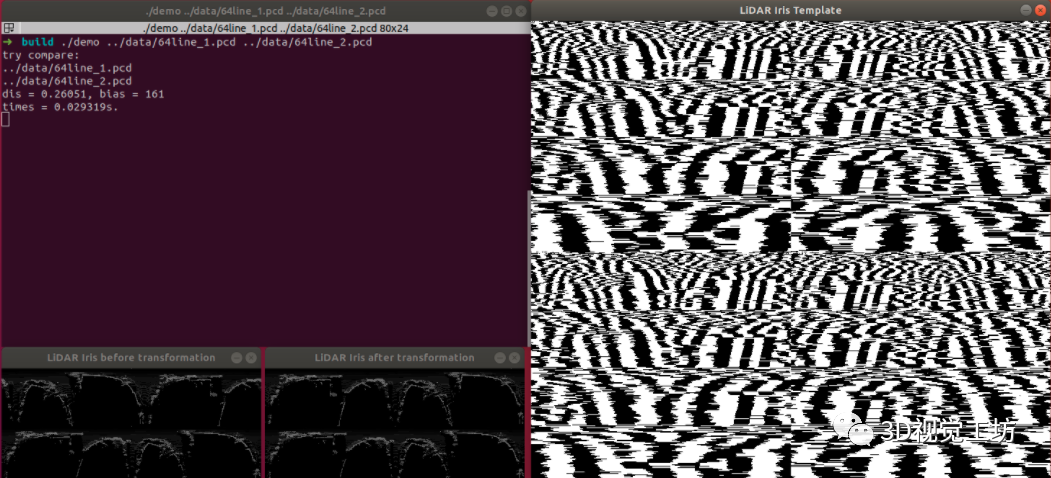
右上是当IRIS检测到回环的时候的候选帧与匹配帧的点云极其对应的IRIS生成图。下图是运行代码单独对比两帧激光点云的IRIS实时输出:
Motivation:目前激光的全局或者局部描述子的描述能力和不变性能里仍然有所欠缺,虽然Scan-Context的提出,很大程度上缓解了这个问题,但是Scan-Context本身仍然有一些缺陷,一是它只利用了最大的高度,丢失了很多点云信息,二是Scan-Context不具有旋转不变性,需要进行暴力匹配,三是Scan-Context缺少特征提取步骤。IRIS一一解决了上述缺陷。
Contribution:
提出了一个LiDAR点云的全局描述符LiDAR Iris,将一个地方总结为在LiDAR-Iris图像表示上进行几次Gabor过滤和阈值操作后获得的二进制签名图像, 充分利用了点云的大部分信息。
该全局描述符具有旋转不变性,避免了暴力搜索,节约了计算资源。
与现有的LIDAR全局描述符相比,该描述符的性能达到了SOTA。
Content: Lidar Iris描述符的生成理论上可以分解为4个步骤: 一是离散化鸟瞰图像;二是对离散后的图像进行编码;三是生成Lidar-Iris图像&
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 5904
5904











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









