









原文链接点击打开链接
参考链接(开机后延时打开摄像头)点击打开链接
准备一个脚本 名字为autoLoad.sh
[python] view plain copy
#! /bin/bash source /opt/ros/indigo/setup.bash roscore
#!/bin/bash
/usr/bin/scim
第一行是声明用什么终端运行这个脚本,第二行就是要运行的命令。
打开终端,在终端中执行gnome-session-properties,会弹出一个“启动应用程序首选项”的菜单 点击添加
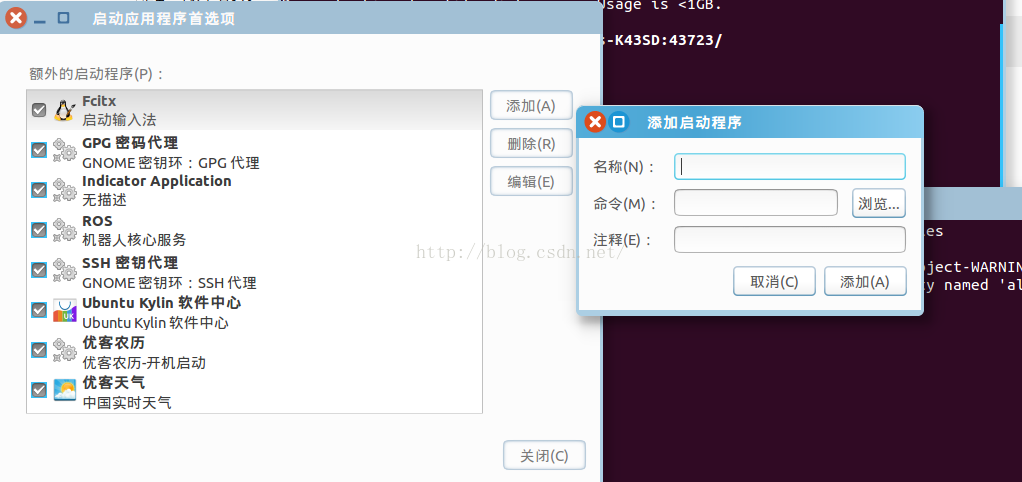
名称 注释随便输入
命令的地方输入
gnome-terminal -x /home/jobs/mecAGV/autoLoad.sh
红色的为路径
如果想要后台运行
则换成
bash /home/jobs/mecAGV/autoLoad.sh
配置TX2开机自启动roslaunch
按照网上的各种教程方法进行了尝试,发现将roslaunch写入的脚本文件,通过其方法启动,均失败。现象为sh脚本文件开机可正常启动,通过ps -aux|grep roslaunch 可查看到roslaunch进程,但通过rosnode list查看不到相关节点的启动。
故经过多次尝试放弃,采用一种较差的方式解决。即将其sh脚本文件写入~/.bashrc中,可实现。但存在一个小问题,每次通过ssh远程连接TX2默认重新启动一次sh脚本。
工作踩坑记录二点击打开链接














 7884
7884











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









