







1、构建原理
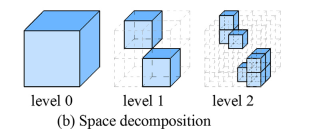
常见的八叉树的构建是根据递归思想构建,在递归划分时,一般按照格网大小,或者是格网内点数进行约束,对格网均匀划分成8个格网,直至满足条件为止。如下为一个立方体被划分成8个子节点示意图。


根据需要,对点云进行八叉树构造,将点云划分成多个小的块。
2、部分核心代码展示
(源码下载地址:机载LiDAR、车载、地基点云数据构建八叉树_八叉树的构建原理-算法与数据结构文档类资源-CSDN下载)
#include "arrayoperation.h"
#include "DataStruct.h"
#include "IO.h"
#include "CalculateFeatures.h"
#include<iostream>
#include<time.h>
#include<stdlib.h>
#include"ConnectLabel.h"
using namespace std;
struct OctreeNode
{
pcl::PointXYZ LeftBottom, RightUp;//该立方体的左下角、右上角点坐标
vector<pcl::PointXYZ> points;
PlaneError PlanePara;//该节点内点平面参数
OctreeNode *Top_left_front, *Top_left_back;// 1 2
OctreeNode *Top_right_front, *Top_right_back;// 3 4
OctreeNode *Bottom_left_front, *Bottom_left_back;// 5 6
OctreeNode *Bottom_right_front, *Bottom_right_back;// 7 8
bool NodeType;//该节点是否可以继续划分 若可以,则是true;不可再分则为false
};
//一个立方体的左下点 与 右上点
struct Cubic
{
pcl::PointXYZ Buttomleft;
pcl::PointXYZ Upright;
};
//判断一个点是否在一个立方体内
//point 待判断的点
//cubics 立方体
bool IsinCubic(pcl::PointXYZ point, Cubic cubics)
{
if (point.x <= cubics.Upright.x && point.y <= cubics.Upright.y && point.z <= cubics.Upright.z && point.x > cubics.Buttomleft.x && point.y > cubics.Buttomleft.y && point.z > cubics.Buttomleft.z)
{
return true;
}
else
{
return false;
}
}
//构造八叉树,终止条件是子节点内点集可以拟合成一个面(拟合误差小于阈值);或者子节点内点数少于小于等于3个
//root 构建好的根节点指针
//residual 平面拟合误差阈值
void BuildOctree(OctreeNode * &root, vector<pcl::PointXYZ> points,double residual)
{
CalculateFeatures calObject;
arrayoperation arrObject;
//创建一个新的根
root = new OctreeNode;
pcl::PointXYZ RightUp, LeftBottom;
vector<double> Xvec, Yvec, Zvec;
for (int i = 0; i < points.size(); i++)
{
Xvec.push_back(points[i].x);
Yvec.push_back(points[i].y);
Zvec.push_back(points[i].z);
}
RightUp.x = arrObject.getMax_vector(Xvec)+0.1;
RightUp.y = arrObject.getMax_vector(Yvec)+0.1;
RightUp.z = arrObject.getMax_vector(Zvec)+0.1;
LeftBottom.x = arrObject.getMin_vector(Xvec)-0.1;
LeftBottom.y = arrObject.getMin_vector(Yvec)-0.1;
LeftBottom.z = arrObject.getMin_vector(Zvec)-0.1;
root->LeftBottom = LeftBottom;
root->RightUp = RightUp;
root->points = points;
root->PlanePara = calObject.estimatePlaneError(root->points);
if (root->PlanePara.sigma < residual)
{
root->NodeType = false;//不可分
root->Top_left_front = NULL;
root->Top_left_back = NULL;
root->Top_right_front = NULL;
root->Top_right_back = NULL;
root->Bottom_left_front = NULL;
root->Bottom_left_back = NULL;
root->Bottom_right_front = NULL;
root->Bottom_right_back = NULL;
}
else
{
root->NodeType = true;//可继续划分
//x、y、z轴分辨率
double gridsizex = (RightUp.x - LeftBottom.x) / 2;
double gridsizey = (RightUp.y - LeftBottom.y) / 2;
double gridsizez = (RightUp.z - LeftBottom.z) / 2;
double xmin = LeftBottom.x;
double ymin = LeftBottom.y;
double zmin = LeftBottom.z;
double xmax = RightUp.x;
double ymax = RightUp.y;
double zmax = RightUp.z;
//8个立方体的左下角 右上角顶点坐标
pcl::PointXYZ LeftBottom_1, LeftBottom_2, LeftBottom_3, LeftBottom_4, LeftBottom_5, LeftBottom_6, LeftBottom_7, LeftBottom_8;//8个子立方体的左下顶点坐标
pcl::PointXYZ RightUp_1, RightUp_2, RightUp_3, RightUp_4, RightUp_5, RightUp_6, RightUp_7, RightUp_8;//8个子立方体的右上顶点坐标
LeftBottom_1.x = xmin; LeftBottom_1.y = ymin; LeftBottom_1.z = zmin + gridsizez;
RightUp_1.x = xmin + gridsizex; RightUp_1.y = ymin + gridsizey; RightUp_1.z = zmax;
LeftBottom_2.x = xmin; LeftBottom_2.y = ymin + gridsizey; LeftBottom_2.z = zmin + gridsizez;
RightUp_2.x = xmin + gridsizex; RightUp_2.y = ymax; RightUp_2.z = zmax;
LeftBottom_3.x = xmin + gridsizex; LeftBottom_3.y = ymin; LeftBottom_3.z = zmin + gridsizez;
RightUp_3.x = xmax; RightUp_3.y = ymin + gridsizey; RightUp_3.z = zmax;
LeftBottom_4.x = xmin + gridsizex; LeftBottom_4.y = ymin + gridsizey; LeftBottom_4.z = zmin + gridsizez;
RightUp_4.x = xmax; RightUp_4.y = ymax; RightUp_4.z = zmax;
LeftBottom_5.x = xmin; LeftBottom_5.y = ymin; LeftBottom_5.z = zmin;
RightUp_5.x = xmin + gridsizex; RightUp_5.y = ymin + gridsizey; RightUp_5.z = zmin + gridsizez;
LeftBottom_6.x = xmin; LeftBottom_6.y = ymin + gridsizey; LeftBottom_6.z = zmin;
RightUp_6.x = xmin + gridsizex; RightUp_6.y = ymax; RightUp_6.z = zmin + gridsizez;
LeftBottom_7.x = xmin + gridsizex; LeftBottom_7.y = ymin; LeftBottom_7.z = zmin;
RightUp_7.x = xmax; RightUp_7.y = ymin + gridsizey; RightUp_7.z = zmin + gridsizez;
LeftBottom_8.x = xmin + gridsizex; LeftBottom_8.y = ymin + gridsizey; LeftBottom_8.z = zmin;
RightUp_8.x = xmax; RightUp_8.y = ymax; RightUp_8.z = zmin + gridsizez;
Cubic cube_1, cube_2, cube_3, cube_4, cube_5, cube_6, cube_7, cube_8;
cube_1.Buttomleft = LeftBottom_1; cube_1.Upright = RightUp_1;
cube_2.Buttomleft = LeftBottom_2; cube_2.Upright = RightUp_2;
cube_3.Buttomleft = LeftBottom_3; cube_3.Upright = RightUp_3;
cube_4.Buttomleft = LeftBottom_4; cube_4.Upright = RightUp_4;
cube_5.Buttomleft = LeftBottom_5; cube_5.Upright = RightUp_5;
cube_6.Buttomleft = LeftBottom_6; cube_6.Upright = RightUp_6;
cube_7.Buttomleft = LeftBottom_7; cube_7.Upright = RightUp_7;
cube_8.Buttomleft = LeftBottom_8; cube_8.Upright = RightUp_8;
//将点划入到8个子节点下
vector<pcl::PointXYZ> points_1, points_2, points_3, points_4, points_5, points_6, points_7, points_8;//每个节点存储的点
for (int i = 0; i < root->points.size(); i++)
{
pcl::PointXYZ curpoint = root->points[i];
if (IsinCubic(curpoint, cube_1) == true)
{
points_1.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_2) == true)
{
points_2.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_3) == true)
{
points_3.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_4) == true)
{
points_4.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_5) == true)
{
points_5.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_6) == true)
{
points_6.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_7) == true)
{
points_7.push_back(curpoint);
}
else if (IsinCubic(curpoint, cube_8) == true)
{
points_8.push_back(curpoint);
}
}//end for
//第一个cubic1
PlaneError fitplane = calObject.estimatePlaneError(points_1);
if (fitplane.sigma > residual && points_1.size() >=4)//点数也要有一定要求
{
root->Top_left_front = new OctreeNode();
vector<pcl::PointXYZ> temp= points_1;
BuildOctree(root->Top_left_front, temp, residual);
}
else//如果可以拟合,直接赋值给下面的孩子
{
root->Top_left_front = new OctreeNode();
root->Top_left_front->LeftBottom = LeftBottom_1;
root->Top_left_front->RightUp = RightUp_1;
root->Top_left_front->points = points_1;
root->Top_left_front->PlanePara = fitplane;
root->Top_left_front->NodeType = false;//不可再分
root->Top_left_front->Top_left_front = NULL;
root->Top_left_front->Top_left_back = NULL;
root->Top_left_front->Top_right_front = NULL;
root->Top_left_front->Top_right_back = NULL;
root->Top_left_front->Bottom_left_front = NULL;
root->Top_left_front->Bottom_left_back = NULL;
root->Top_left_front->Bottom_right_front = NULL;
root->Top_left_front->Bottom_right_back = NULL;
}
//第二个cubic2
fitplane = calObject.estimatePlaneError(points_2);
if (fitplane.sigma > residual && points_2.size() > 3)//点数也要有一定要求
{
root->Top_left_back = new OctreeNode();
vector<pcl::PointXYZ> temp = points_2;
BuildOctree(root->Top_left_back, temp, residual);
}
else
{
root->Top_left_back = new OctreeNode();
root->Top_left_back->LeftBottom = LeftBottom_2;
root->Top_left_back->RightUp = RightUp_2;
root->Top_left_back->points = points_2;
root->Top_left_back->PlanePara = fitplane;
root->Top_left_back->NodeType = false;//不可再分
//其他变成NULL
root->Top_left_back->Top_left_front = NULL;
root->Top_left_back->Top_left_back = NULL;
root->Top_left_back->Top_right_front = NULL;
root->Top_left_back->Top_right_back = NULL;
root->Top_left_back->Bottom_left_front = NULL;
root->Top_left_back->Bottom_left_back = NULL;
root->Top_left_back->Bottom_right_front = NULL;
root->Top_left_back->Bottom_right_back = NULL;
}
//第三个cubic3
fitplane = calObject.estimatePlaneError(points_3);
if (fitplane.sigma > residual && points_3.size() > 3)//点数也要有一定要求
{
root->Top_right_front = new OctreeNode();
vector<pcl::PointXYZ> temp = points_3;
BuildOctree(root->Top_right_front, temp, residual);
}
else
{
root->Top_right_front = new OctreeNode();
root->Top_right_front->LeftBottom = LeftBottom_3;
root->Top_right_front->RightUp = RightUp_3;
root->Top_right_front->points = points_3;
root->Top_right_front->PlanePara = fitplane;
root->Top_right_front->NodeType = false;//不可再分
root->Top_right_front->Top_left_front = NULL;
root->Top_right_front->Top_left_back = NULL;
root->Top_right_front->Top_right_front = NULL;
root->Top_right_front->Top_right_back = NULL;
root->Top_right_front->Bottom_left_front = NULL;
root->Top_right_front->Bottom_left_back = NULL;
root->Top_right_front->Bottom_right_front = NULL;
root->Top_right_front->Bottom_right_back = NULL;
}
//第四个cubic4
fitplane = calObject.estimatePlaneError(points_4);
if (fitplane.sigma > residual && points_4.size() > 3)//点数也要有一定要求
{
root->Top_right_back = new OctreeNode();
vector<pcl::PointXYZ> temp = points_4;
BuildOctree(root->Top_right_back, temp, residual);
}
else
{
root->Top_right_back = new OctreeNode();
root->Top_right_back->LeftBottom = LeftBottom_4;
root->Top_right_back->RightUp = RightUp_4;
root->Top_right_back->points = points_4;
root->Top_right_back->PlanePara = fitplane;
root->Top_right_back->NodeType = false;//不可再分
root->Top_right_back->Top_left_front = NULL;
root->Top_right_back->Top_left_back = NULL;
root->Top_right_back->Top_right_front = NULL;
root->Top_right_back->Top_right_back = NULL;
root->Top_right_back->Bottom_left_front = NULL;
root->Top_right_back->Bottom_left_back = NULL;
root->Top_right_back->Bottom_right_front = NULL;
root->Top_right_back->Bottom_right_back = NULL;
}
//第五个cubic5
fitplane = calObject.estimatePlaneError(points_5);
if (fitplane.sigma > residual && points_5.size() > 3)//点数也要有一定要求
{
root->Bottom_left_front = new OctreeNode();
vector<pcl::PointXYZ> temp = points_5;
BuildOctree(root->Bottom_left_front, temp, residual);
}
else
{
root->Bottom_left_front = new OctreeNode();
root->Bottom_left_front->LeftBottom = LeftBottom_5;
root->Bottom_left_front->RightUp = RightUp_5;
root->Bottom_left_front->points = points_5;
root->Bottom_left_front->PlanePara = fitplane;
root->Bottom_left_front->NodeType = false;//不可再分
root->Bottom_left_front->Top_left_front = NULL;
root->Bottom_left_front->Top_left_back = NULL;
root->Bottom_left_front->Top_right_front = NULL;
root->Bottom_left_front->Top_right_back = NULL;
root->Bottom_left_front->Bottom_left_front = NULL;
root->Bottom_left_front->Bottom_left_back = NULL;
root->Bottom_left_front->Bottom_right_front = NULL;
root->Bottom_left_front->Bottom_right_back = NULL;
}
//第六个cubic6
fitplane = calObject.estimatePlaneError(points_6);
if (fitplane.sigma > residual && points_6.size() > 3)//点数也要有一定要求
{
root->Bottom_left_back = new OctreeNode();
vector<pcl::PointXYZ> temp = points_6;
BuildOctree(root->Bottom_left_back, temp, residual);
}
else
{
root->Bottom_left_back = new OctreeNode();
root->Bottom_left_back->LeftBottom = LeftBottom_6;
root->Bottom_left_back->RightUp = RightUp_6;
root->Bottom_left_back->points = points_6;
root->Bottom_left_back->PlanePara = fitplane;
root->Bottom_left_back->NodeType = false;//不可再分
root->Bottom_left_back->Top_left_front = NULL;
root->Bottom_left_back->Top_left_back = NULL;
root->Bottom_left_back->Top_right_front = NULL;
root->Bottom_left_back->Top_right_back = NULL;
root->Bottom_left_back->Bottom_left_front = NULL;
root->Bottom_left_back->Bottom_left_back = NULL;
root->Bottom_left_back->Bottom_right_front = NULL;
root->Bottom_left_back->Bottom_right_back = NULL;
}
//第七个cubic7
fitplane = calObject.estimatePlaneError(points_7);
if (fitplane.sigma > residual && points_7.size() > 3)//点数也要有一定要求
{
root->Bottom_right_front = new OctreeNode();
vector<pcl::PointXYZ> temp = points_7;
BuildOctree(root->Bottom_right_front, temp, residual);
}
else
{
root->Bottom_right_front = new OctreeNode();
root->Bottom_right_front->LeftBottom = LeftBottom_7;
root->Bottom_right_front->RightUp = RightUp_7;
root->Bottom_right_front->points = points_7;
root->Bottom_right_front->PlanePara = fitplane;
root->Bottom_right_front->NodeType = false;//不可再分
root->Bottom_right_front->Top_left_front = NULL;
root->Bottom_right_front->Top_left_back = NULL;
root->Bottom_right_front->Top_right_front = NULL;
root->Bottom_right_front->Top_right_back = NULL;
root->Bottom_right_front->Bottom_left_front = NULL;
root->Bottom_right_front->Bottom_left_back = NULL;
root->Bottom_right_front->Bottom_right_front = NULL;
root->Bottom_right_front->Bottom_right_back = NULL;
}
//第八个cubic8
fitplane = calObject.estimatePlaneError(points_8);
if (fitplane.sigma > residual && points_8.size() > 3)//点数也要有一定要求
{
root->Bottom_right_back = new OctreeNode();
vector<pcl::PointXYZ> temp = points_8;
BuildOctree(root->Bottom_right_back, temp, residual);
}
else
{
root->Bottom_right_back = new OctreeNode();
root->Bottom_right_back->LeftBottom = LeftBottom_8;
root->Bottom_right_back->RightUp = RightUp_8;
root->Bottom_right_back->points = points_8;
root->Bottom_right_back->PlanePara = fitplane;
root->Bottom_right_back->NodeType = false;//不可再分
root->Bottom_right_back->Top_left_front = NULL;
root->Bottom_right_back->Top_left_back = NULL;
root->Bottom_right_back->Top_right_front = NULL;
root->Bottom_right_back->Top_right_back = NULL;
root->Bottom_right_back->Bottom_left_front = NULL;
root->Bottom_right_back->Bottom_left_back = NULL;
root->Bottom_right_back->Bottom_right_front = NULL;
root->Bottom_right_back->Bottom_right_back = NULL;
}
}
}
//将平整度好的点集和平整度不好的点集分开存放
//root 八叉树节点
//planecluster 平整度好的点集
//nonplanecluster 平整度不好的点集
void FalseCluster(OctreeNode * &root, vector<vector<pcl::PointXYZ>> &planecluster, vector<vector<pcl::PointXYZ>> &nonplanecluster)
{
if (root != NULL)
{
vector<vector<pcl::PointXYZ>> tempplanecluster, tempnonplanecluster;
tempplanecluster = planecluster;
planecluster.clear();
tempnonplanecluster = nonplanecluster;
nonplanecluster.clear();
if (root->NodeType == false)//不可再分 子节点
{
if (root->points.size() > 5)
{
tempplanecluster.push_back(root->points);
}
else
{
tempnonplanecluster.push_back(root->points);
}
}
planecluster = tempplanecluster;
nonplanecluster = tempnonplanecluster;
FalseCluster(root->Top_left_front, planecluster, nonplanecluster);
FalseCluster(root->Top_left_back, planecluster, nonplanecluster);
FalseCluster(root->Top_right_front, planecluster, nonplanecluster);
FalseCluster(root->Top_right_back, planecluster, nonplanecluster);
FalseCluster(root->Bottom_left_front, planecluster, nonplanecluster);
FalseCluster(root->Bottom_left_back, planecluster, nonplanecluster);
FalseCluster(root->Bottom_right_front, planecluster, nonplanecluster);
FalseCluster(root->Bottom_right_back, planecluster, nonplanecluster);
}
}
void main()
{
IO ioObject;
vector<pcl::PointXYZ> cloud;
cloud = ioObject.ReadPointXYZIntoVector("XX.xyz");
OctreeNode *root = new OctreeNode();
BuildOctree(root, cloud, 0.1);
vector<vector<pcl::PointXYZ>> planecluster, nonplanecluster;
FalseCluster(root, planecluster, nonplanecluster);
ofstream outfile("multiple_whole.txt", ios::out);
srand((int)time(0));
for (int i = 0; i < planecluster.size(); i++)
{
int R = GetRandomNumber();
int G = GetRandomNumber();
int B = GetRandomNumber();
for (int j = 0; j < planecluster[i].size(); j++)
{
outfile << planecluster[i][j].x << "\t" << planecluster[i][j].y << "\t" << planecluster[i][j].z << "\t" << R << "\t" << G << "\t" << B << endl;
}
}
outfile.close();
cout << "finish" << endl;
system("pause");
}
构建的八叉树指针,可见一层一层往下进行的

点云根据构建的八叉树,划分的结果如下:

















 699
699











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











