










01基本逻辑
用八叉树来表示三维形体,并研究这种表示下的各种操作以及应用,是进入80年代后开展起来的一种方法。这种方法,既可以看成是四叉树方法在三维空间的推广,也可以认为是三维体素阵列表示形体方法的一种改进。 假设要表示的形体V可以放在一个充分大的正方体C中,C的边长为2n。
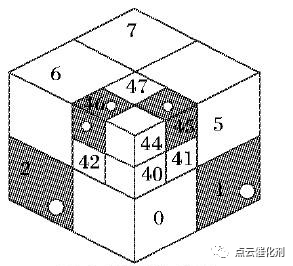
八叉树的每一个节点与C的一个子立方体对应 ,树根与C本身相对应。如果V=C,那么V的八叉树只有树根。如果V不等于C,则将C等分为8个子立方体,每个子立方体与树根的一个子节点相对应。只要某个子立方体不是完全空白,或者完全为V所占据,就要被八等分,从而对应的节点也就有了八个子节点。这样的递归判断,分割一直要进行到节点所对应的立方体完全为空,或是完全为V所占据,或是其大小已经是预先定义的体素大小,并且对他与V之交作一定的“舍入”,使体素或认为是空白的,或认为是V占据的。
02CloudCompare中的八叉树
CloudCompare中使用的DgmOctree作为八叉树数据结构,具体实现过程如下:

八叉树将空间分割成八块,根据2进制,3位2进制即可表示8个数字,3位中的顺序:zyx顺序区分,从小递增到大,如:011,即z为0,x为1,y为 1的块位置。所以64位操作系统最多可分割为64/3 = 21级,32位操作系统最多可分割为32/3 = 10级。
1、建立单维索引(CellCode)
将原有的1位2进制转为3位,如:001(1)转为000 000 001,010(2) 转为 000 001 000,以此类推。另外两个维度的code分别左移1位和2位即可。软件初始化时就计算完了所有CellCode。
//we compute all possible values for cell codes
//(along a unique dimension, the other ones are just shifted)
for (int value = 0; value < VALUE_COUNT; ++value)
{
int mask = VALUE_COUNT;//(1 << MAX_OCTREE_LEVEL)
CCLib::DgmOctree::CellCode code = 0;
for (unsigned char k = 0; k < CCLib::DgmOctree::MAX_OCTREE_LEVEL; k++)
{
mask >>= 1;
code <<= 3;
if (value & mask)
{
code |= 1;
}
}
values[value] = code;
}
2、判断点所在位置(CellPos)
会默认计算最高层级下的位置,按照矩形索引的方式推算到3维,其他层级的pos,则计算当前点在最高层级下的pos,然后右移(最高层级-当前层级)位。
const PointCoordinateType& cs = getCellSize(MAX_OCTREE_LEVEL);
//DGM: if we admit that cs >= 0, then the 'floor' operator is useless (int cast = truncation)
cellPos.x = static_cast<int>(/*floor*/(thePoint->x - m_dimMin.x)/cs);
cellPos.y = static_cast<int>(/*floor*/(thePoint->y - m_dimMin.y)/cs);
cellPos.z = static_cast<int>(/*floor*/(thePoint->z - m_dimMin.z)/cs)
3、CellPos与CellCode的转换
CellPos先左移(最高层级-当前层级)位,再将y左移1位,z左移2位,对xyz取或处理,然后右移3*(最高层级-当前层级)位。
//最高层级-当前层级
const unsigned char dec = MAX_OCTREE_LEVEL - level;
//PRE_COMPUTED_POS_CODES 为软件初始化时建立的单维CellCode
CellCode code = (PRE_COMPUTED_POS_CODES.values[cellPos.x << dec]
| (PRE_COMPUTED_POS_CODES.values[cellPos.y << dec] << 1)
| (PRE_COMPUTED_POS_CODES.values[cellPos.z << dec] << 2))
>> (3 * (MAX_OCTREE_LEVEL - level));
4、CloudCompare中八叉树的应用(查找给定立方体内的点)
a.计算出给定立方体的最大角点和最小角点
b.判断最大角点和最小角点所在给定层级的Pos
c.判断当前层级是否有在给定立方体相交的pos
d.循环所有pos中的点
e.判断点是否在立方体内
















 518
518











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









