







Cloudcompare软件(CC)中可以对点云进行八叉树进行组织并进行可视化,有助于理解八叉树对数据组织方式与原理。
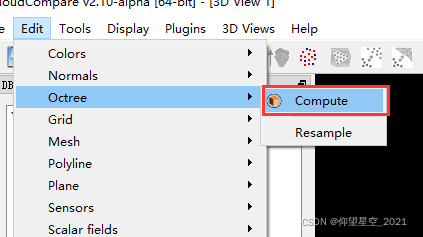
1. Octree的组织
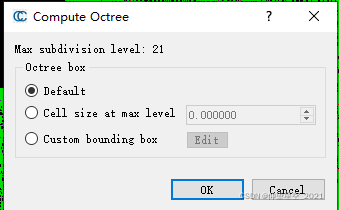
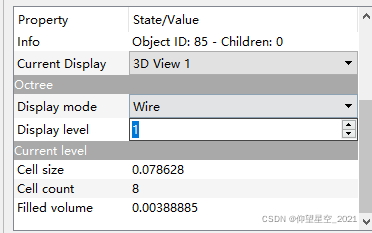
CC中设置八叉树的步骤如下,其默认是根据原始点云数据坐标,计算包含点云数据的最小立方体,再对该立方体进行8等份。
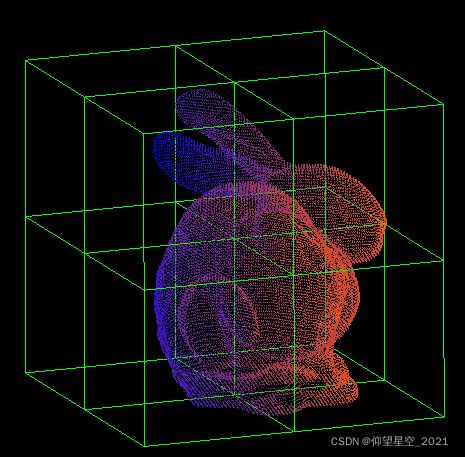
8个子立方体内均包含了点云数据,因此显示出8个立方体。

2. 可视化
其包含3种可视化方式,分别为线、点、实体三种,如下所示
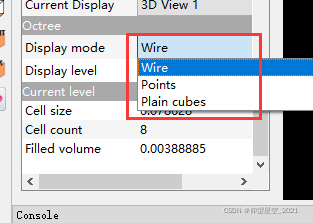
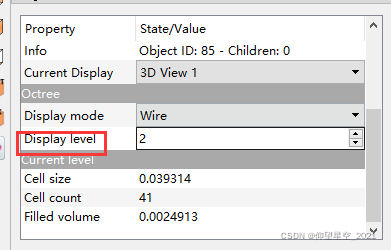
显示级别,可以理解成将立方体划分成的次数,比如2就是将立方体划分2次
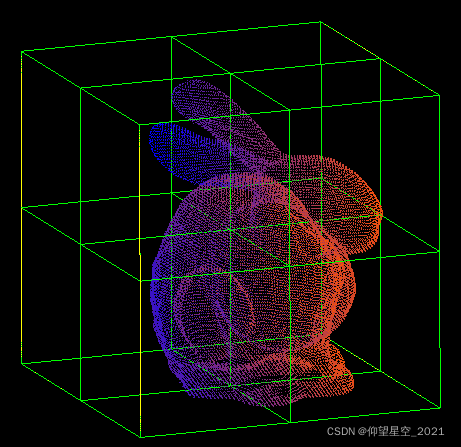
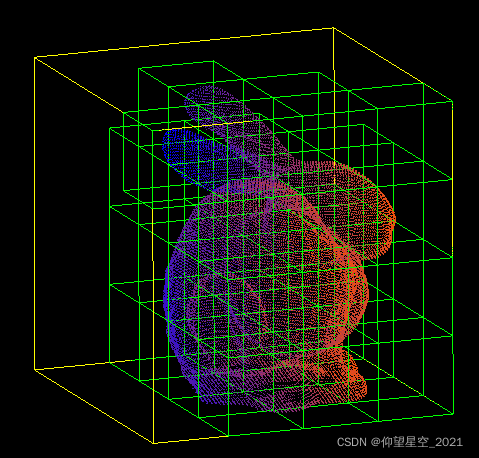
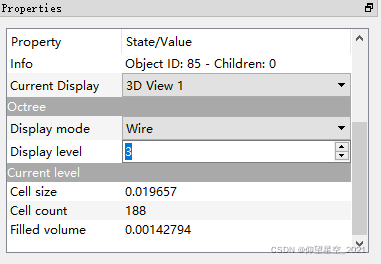
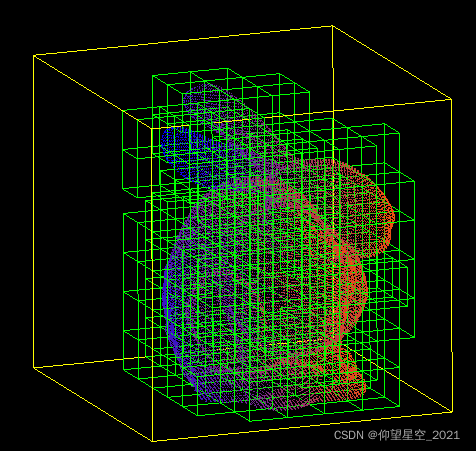
通过上述的八叉树可见,其是把点云划分成多个单元格网,如果格网内包括点则显示格网,否则不显示格网。这与对点云进行体素化感觉是一样的,均是将点划分到最小体素内。


















 326
326

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











