










极线约束(Epipolar Constraint),本质矩阵(Essential Matrix),基础矩阵(Fundamental Matrix),对极几何(2D-2D)
考虑一个SLAM中一个常见的问题:如果两个相机在不同位置拍摄同一个物体,或者一个运动的相机在不同时刻拍摄同一物体,我们有理由相信两张图片中各点存在着某种几何关系,这种关系可以用对极几何来描述。对极几何描述了两帧图像中各像素的射影关系(或者说是各匹配点的几何关系),其与外部的场景本身无关,只与相机的内参以及两图像的拍摄位置有关。
本文重点分析对极几何(Epipolar Geometry)、对极约束(Epipolar Constraint)、本质矩阵(Essential Matrix)和基础矩阵(Fundamental Matrix),以及他们之间的关系。
1. 对极约束(The Epipolar Constraint)
We know that
x
1
x_1
x1 (in homogeneous coordinates) is the projection of 3D coordinate
X
X
X on the image plane.
λ
1
x
1
=
X
,
λ
2
x
2
=
R
X
+
T
λ
2
x
2
=
R
(
λ
1
x
1
)
+
T
\lambda_1x_1=X, \quad \lambda_2x_2=RX+T \\ \lambda_2x_2=R(\lambda_1x_1) + T
λ1x1=X,λ2x2=RX+Tλ2x2=R(λ1x1)+T
Then, we remove the translation by multiplying with
T
∧
T^{\wedge}
T∧, the skew matrix.
λ
2
T
∧
x
2
=
λ
1
T
∧
R
x
1
+
0
\lambda_2T^{\wedge}x_2=\lambda_1T^{\wedge}Rx_1+0 \\
λ2T∧x2=λ1T∧Rx1+0
Then, we projection onto
x
2
x_2
x2 gives the epipolar constraint:
λ
2
x
2
T
T
∧
x
2
=
λ
1
x
2
T
T
∧
R
x
1
\lambda_2x_2^TT^{\wedge}x_2=\lambda_1x_2^TT^{\wedge}Rx_1
λ2x2TT∧x2=λ1x2TT∧Rx1
As we know,
T
×
x
2
=
T
∧
x
2
T\times x_2=T^{\wedge}x_2
T×x2=T∧x2, is the cross product, which generates a third vector that perpendicular to the plane which is spanned by
T
T
T and
x
2
x_2
x2.
So,
λ
2
x
2
T
T
∧
x
2
=
0
\lambda_2x_2^TT^{\wedge}x_2=0
λ2x2TT∧x2=0. The dot product of
x
2
x_2
x2 and vector
T
∧
x
2
T^{\wedge}x_2
T∧x2 is zero. Then, we have:
x
2
T
T
∧
R
x
1
=
0
x_2^TT^{\wedge}Rx_1=0
x2TT∧Rx1=0
This is called epipolar constraint.
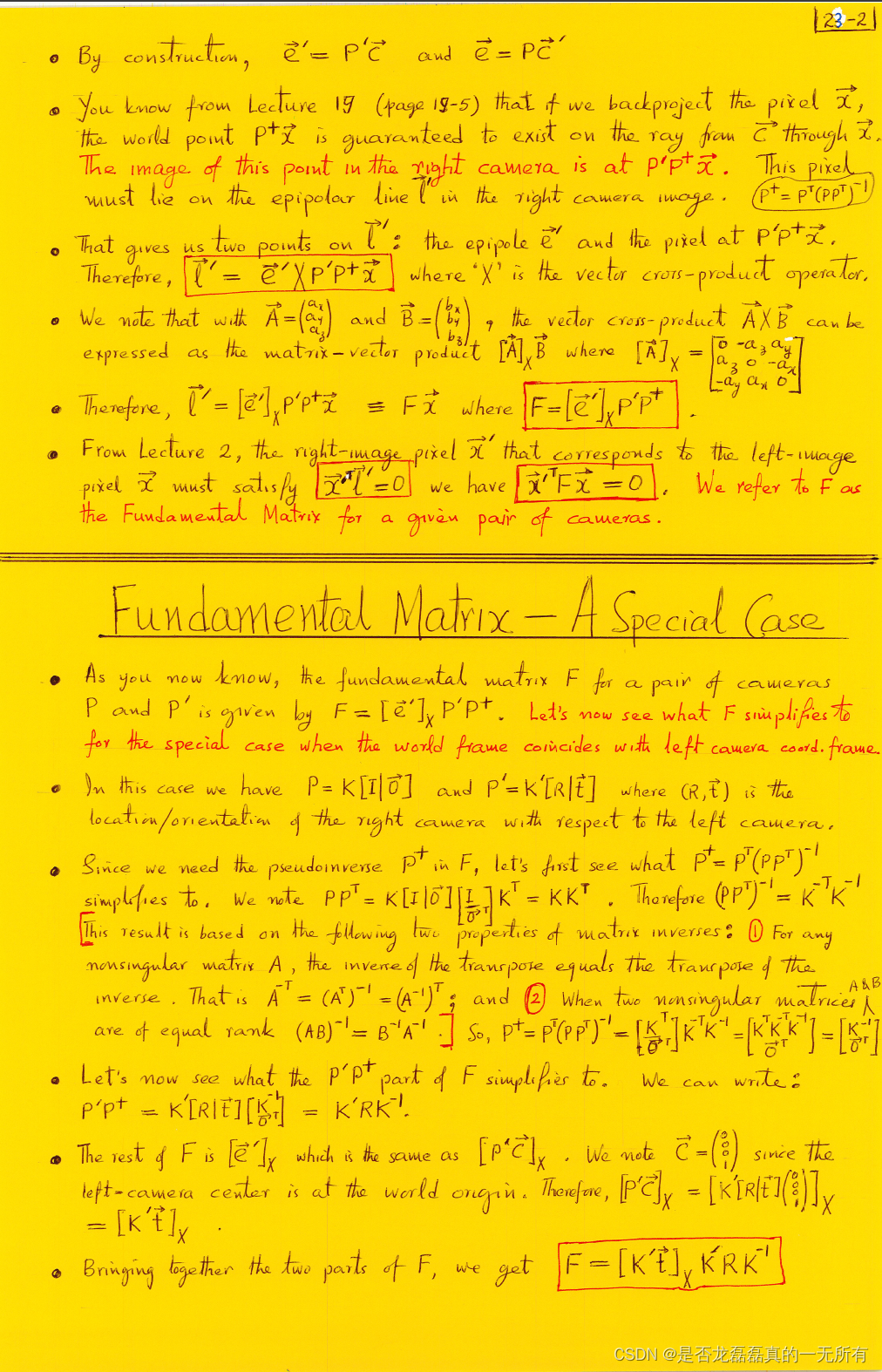
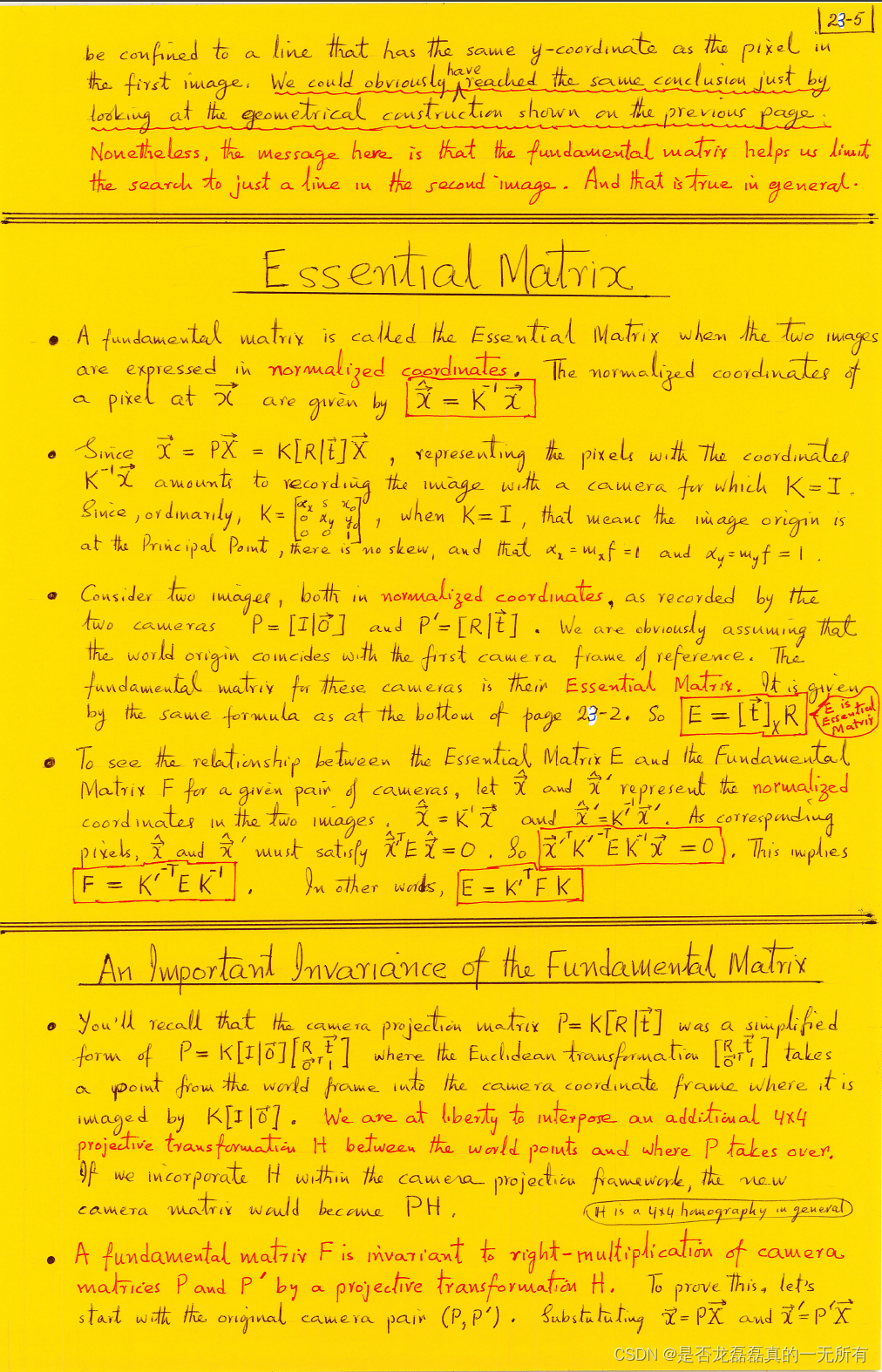
2. 本质矩阵(Essential Matrix E E E)
The matrix E = T ∧ R ∈ R 3 × 3 E=T^{\wedge}R \in R^{3\times3} E=T∧R∈R3×3 is essential matrix. Provide the relation between the 2D point coordinates of 3D point in each of the two images and the camera transformation parameters.
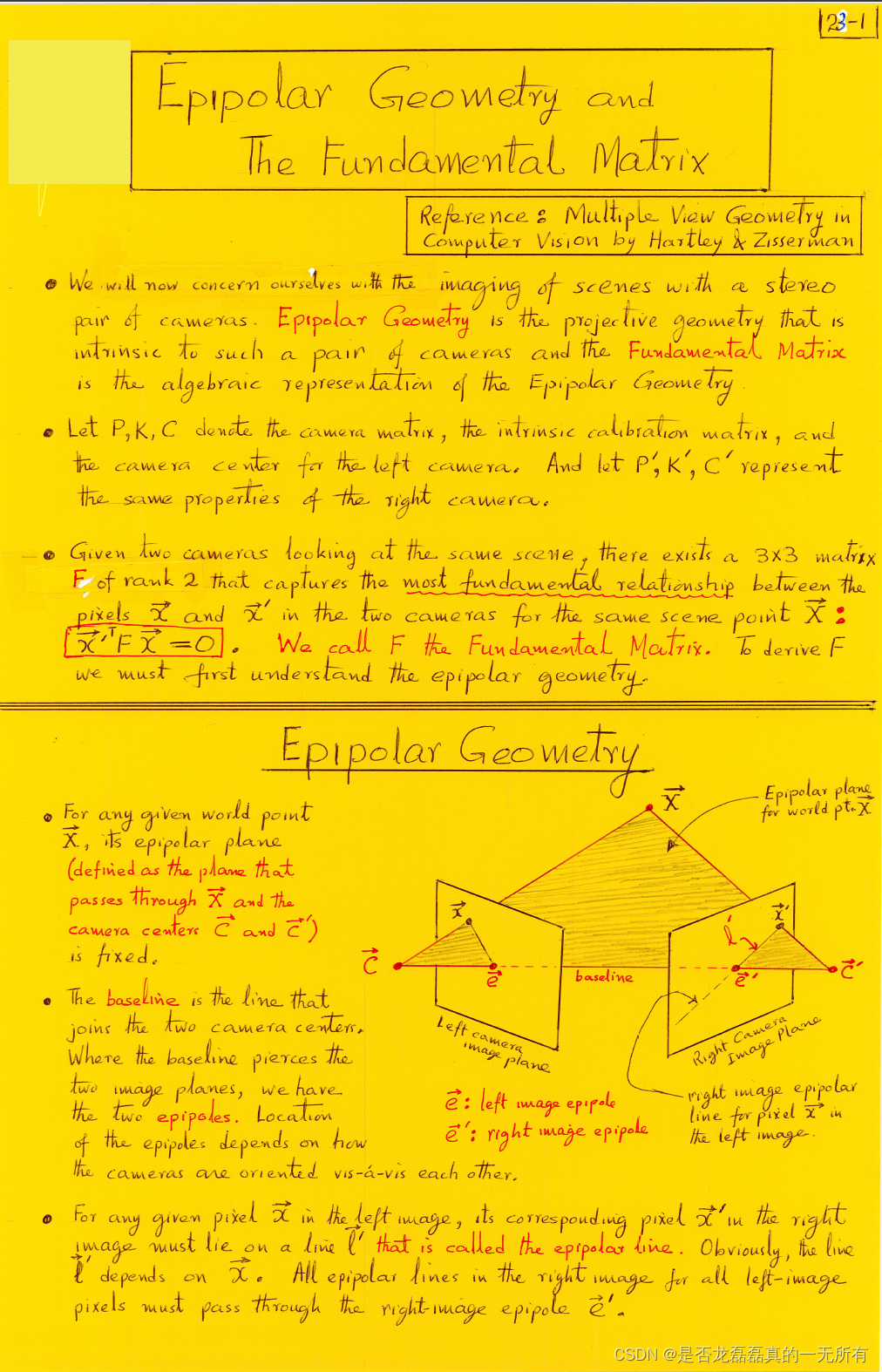
This constraint states that the three vector
o
1
X
⃗
\vec{o_1X}
o1X,
o
2
X
⃗
\vec{o_2X}
o2X and
o
2
o
1
⃗
\vec{o_2o_1}
o2o1 form a plane, and the volume of the plane is 0. This is called the volume spanned by
x
2
x_2
x2,
x
1
x_1
x1, and
R
,
T
R, T
R,T, such that:
v
o
l
u
m
e
=
x
2
T
(
T
×
R
)
x
1
=
0
x
2
T
E
x
1
=
0
volume = x_2^T(T\times R)x_1=0 \\ x_2^TEx_1=0
volume=x2T(T×R)x1=0x2TEx1=0
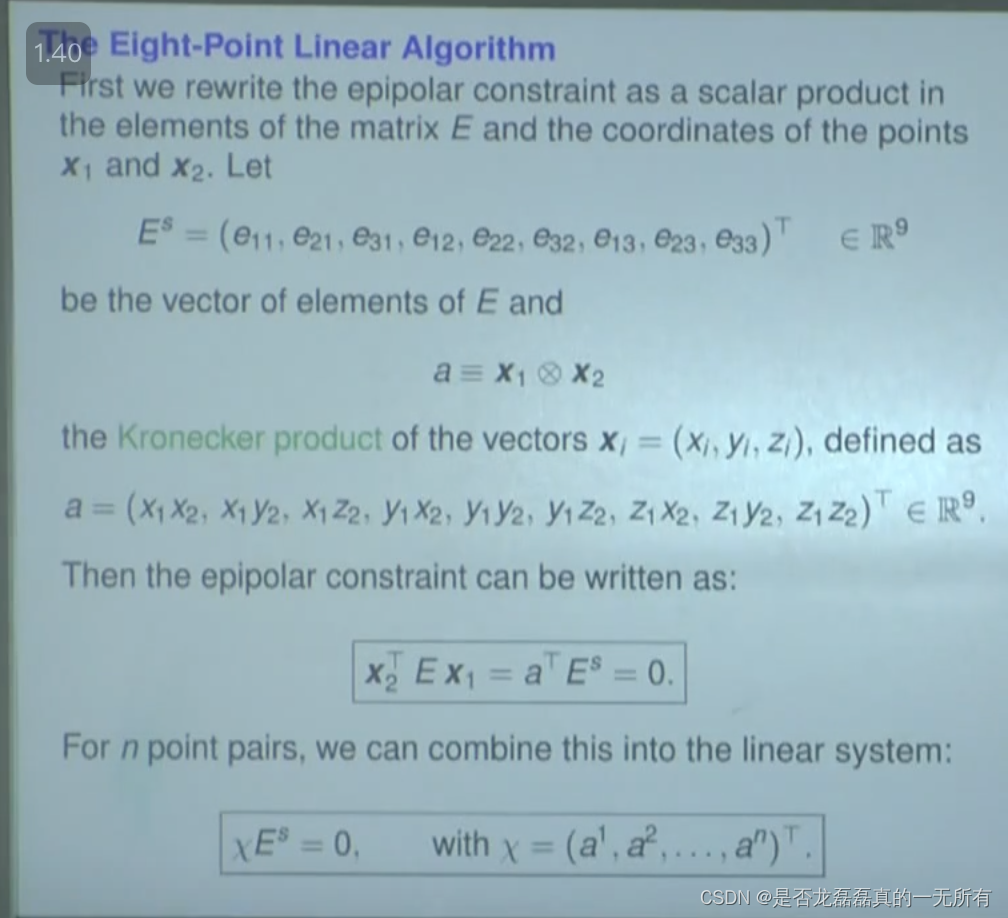
The unique solution, need eight point pairs to solve.
x
2
T
E
x
1
=
0
=
a
T
E
s
=
0.
x_2^TEx_1=0=a^TE^s=0.
x2TEx1=0=aTEs=0.
For
n
n
n point pairs, we can combine this into the linear system.
χ
E
s
=
0
,
w
i
t
h
χ
=
(
a
1
,
a
2
,
.
.
.
,
a
n
)
T
.
\chi E^s=0, \quad with \ \ \chi =(a^1,a^2, ...,a^n)^T.
χEs=0,with χ=(a1,a2,...,an)T.
3. 对极几何(Epipolar Geometry)
4. 基础矩阵(Fundamental Matrix)
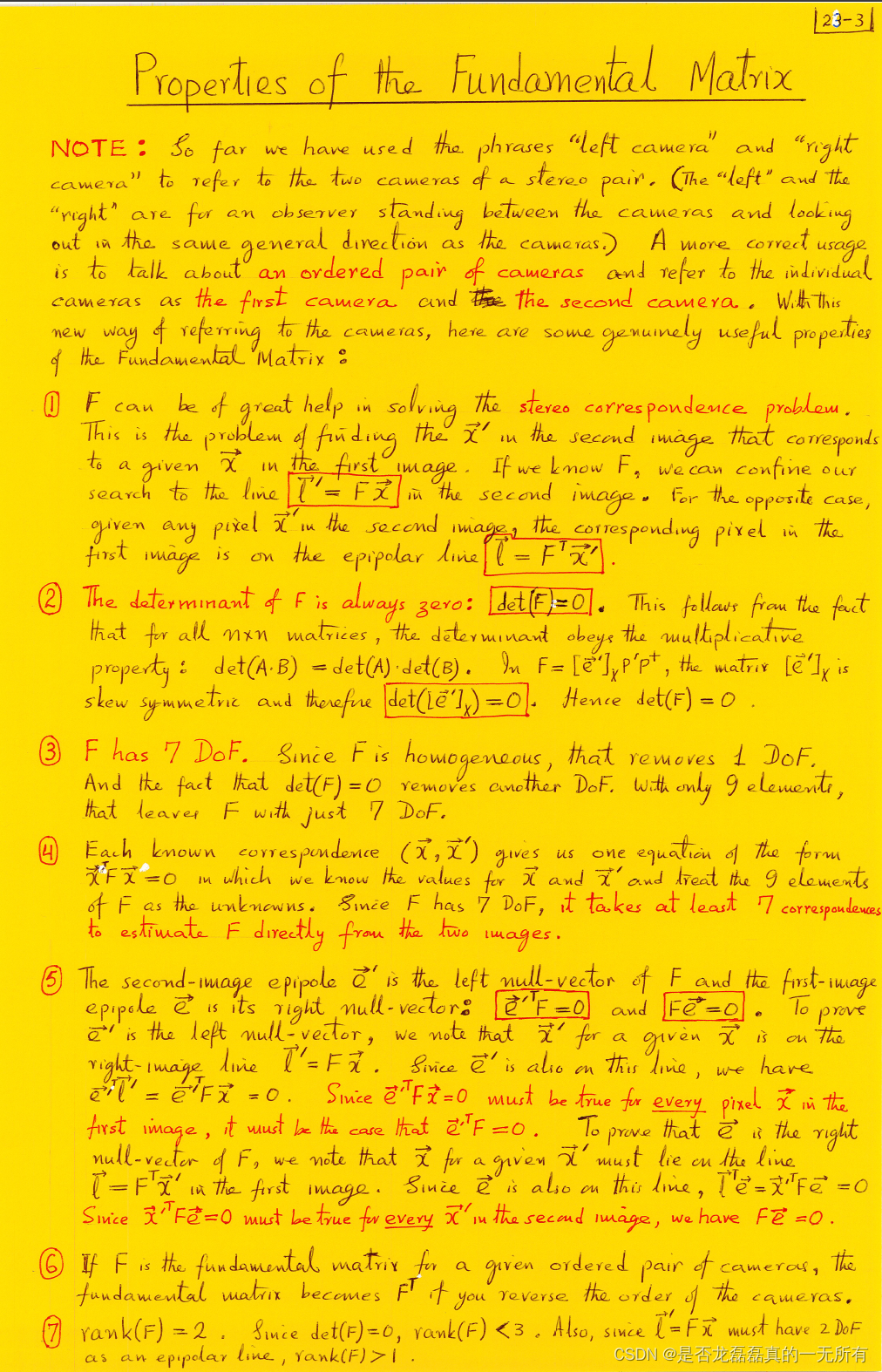
4.1 基础矩阵的性质(Properties of Fundamental Matrix)
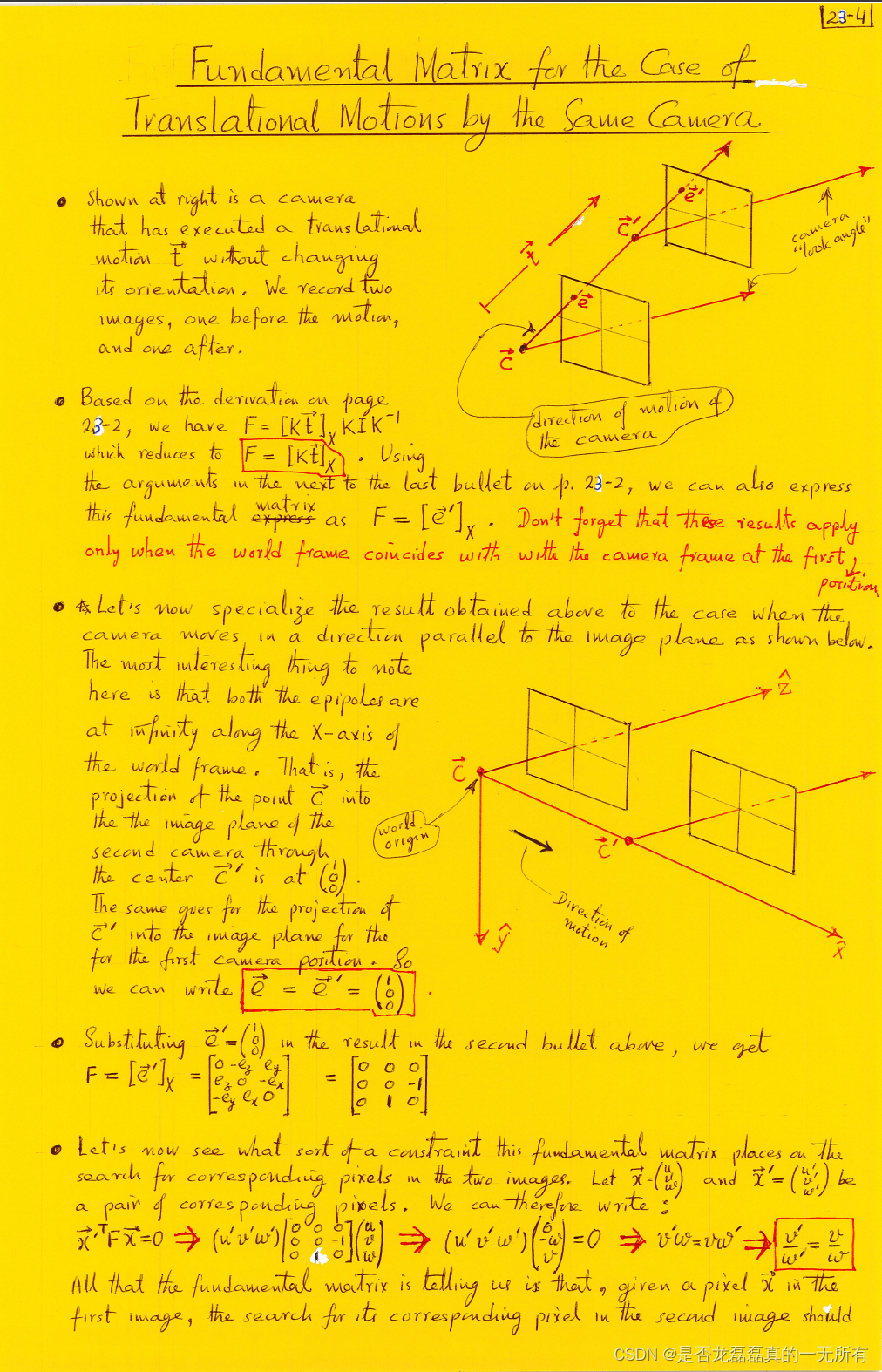
4.2 相机中平移运动的特例(Translational Motion by the Same Camera)
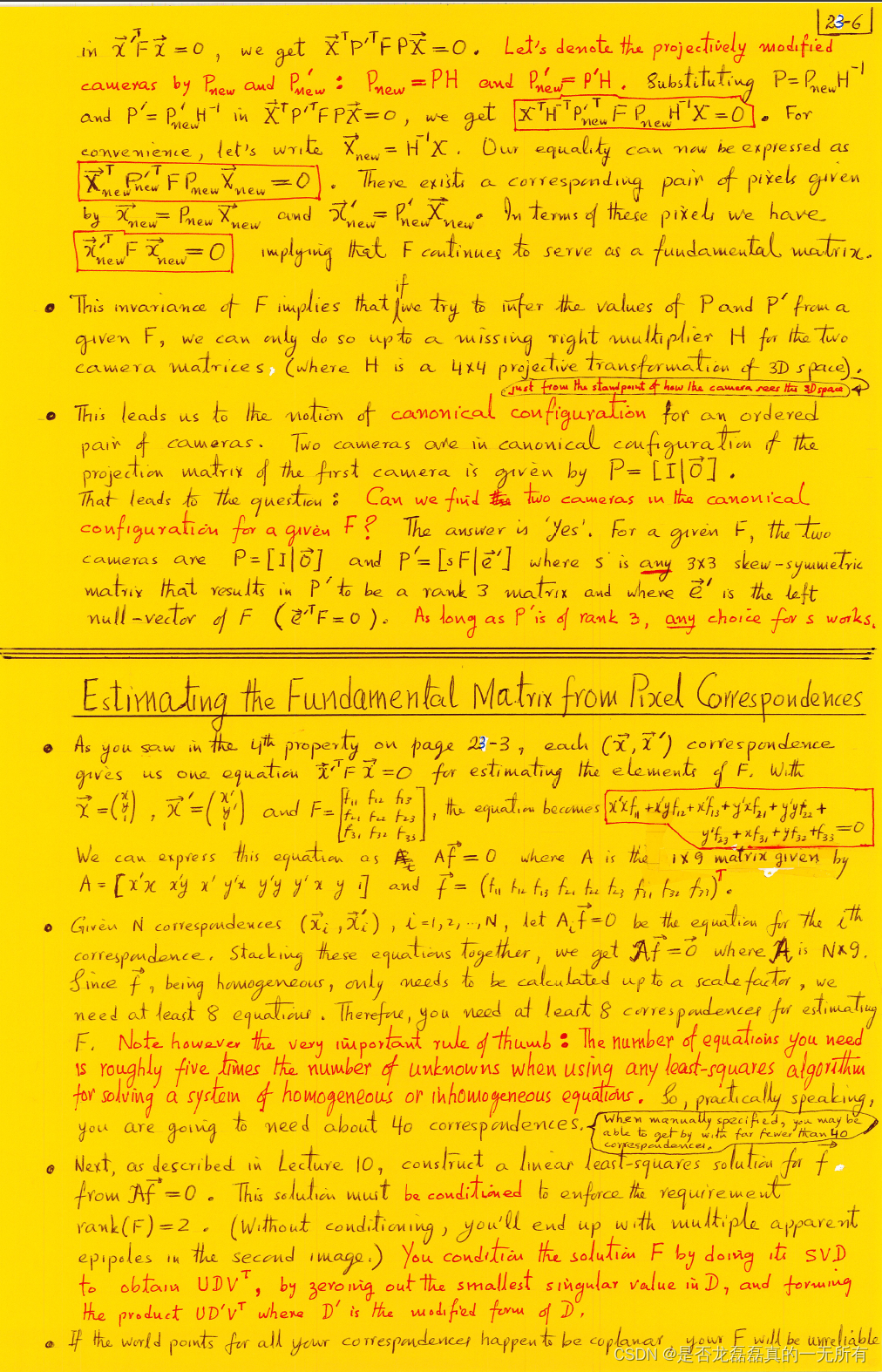
4.3 如何从对应点中估计基础矩阵(Estimating the Fundamental Matrix from Pixel Correspondence)














 721
721











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









