







 本文档详细介绍了基于SLAM融合构图的自主轮式仓储货运机器人技术,包括硬件基础(如STM32控制模块、RPLIDAR A2激光雷达)、操作系统环境(Ubuntu 14.04、ROS Indigo)、软件依赖,以及ROS的安装配置、rplidar和navigation工具包的安装。此外,还涉及了参数配置和操作演示,如amcl定位器和局部规划器的参数设置,以及机器人的启动、地图构建和自主导航流程。
本文档详细介绍了基于SLAM融合构图的自主轮式仓储货运机器人技术,包括硬件基础(如STM32控制模块、RPLIDAR A2激光雷达)、操作系统环境(Ubuntu 14.04、ROS Indigo)、软件依赖,以及ROS的安装配置、rplidar和navigation工具包的安装。此外,还涉及了参数配置和操作演示,如amcl定位器和局部规划器的参数设置,以及机器人的启动、地图构建和自主导航流程。
基于SLAM融合构图的自主轮式仓储货运机器人技术说明
本文为基于SLAM融合构图的自主轮式仓储货运机器人技术说明文档,旨在说明基于SLAM融合构图的自主轮式仓储货运机器人环境依赖与操作配置。操作演示请参考演示PPT&视频。项目计划请参考项目计划书/基于SLAM融合构图的自主轮式仓储货运机器人-项目计划书
1 环境说明
1.1 硬件基础
正方形或圆形双轮机器人
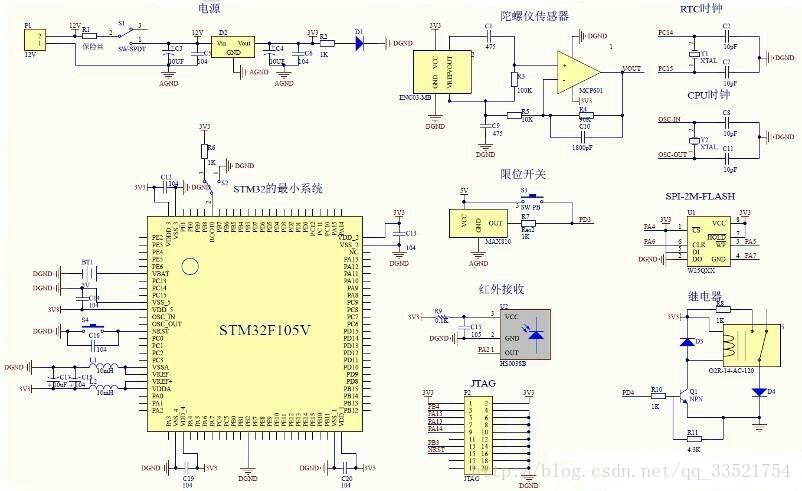
STM 32 控制模块
RPLIDAR A2 激光雷达

1.2 操作系统环境
Ubuntu 14.04
ROS Indigo
1.3 软件依赖
| 软件功能包名称 | 软件功能包功能 |
|---|---|
| rplidar | 激光雷达驱动,数据采集 |
| serial | 串口通讯 |
| navigation | 基础导航功能 |
| hector_slam | 基础SLAM构图功能 |
2 环境配置
2.1 安装与配置 ROS
安装ROS具体教程参见ROS安装中文教程
2.1.1 安装 ROS
2.1.1.1 添加 source.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.1.1.2 添加 keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1162.1.1.3 安装
sudo apt-get update
sudo apt-get install ros-indigo-desktop-full2.1.1.4 初始化 rosdep
sudo rosdep init
rosdep update2.1.1.5 环境配置
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc2.1.2 创建ROS工作空间
2.1.2.1 创建catkin_ws
mkdir -p ~/catkin_ws/src2.1.2.2 编译catkin_ws
cd ~/catkin_ws/
catkin_make2.1.2.3 配置catkin_ws环境
source devel/setup.bash2.1.2.4 catkin_ws说明
本次提交作品中项目源码/src文件夹即为机器人上位机上catkin_ws/src文件夹。
2.2 安装与配置 serial
2.2.1 安装serial
因为本次开发没有修改serial相关代码,故可以用命令行安装
sudo apt-get install ros-indigo-serial2.2.2 从源码安装
当然也可以从源码安装
cd ~/catkin_ws/src
git clone https://github.com/wjwwood/serial.git
cd ~/catkin_ws
catkin_make2.3 安装与配置 rplidar
2.3.1 rplidar包下载
cd ~/catkin_ws/src
git clone https://github.com/robopeak/rplidar_ros 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1957
1957

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









