







论文:AAAI 2011
代码:Julia
基于锚点的谱聚类
核心: 选取一个较小的anchor集【通常为原始数据点的子集】,计算所有数据点和anchor集之间的相似度,减少相似度矩阵维度 or 使得相似度矩阵稀疏化【导致拉普拉斯矩阵也是稀疏的,从而更高效地计算出谱】。
摘要
由于谱聚类的时间复杂度过高导致其无法在大数据集上应用,因此出现了很多改进的方法:比如使用采样策略减少数据的尺寸,或者是减少特征分解步骤的时间复杂度。对于采样的方法,虽然它们很有效,但代价是在采样过程损失了数据的结构信息。
本文提出了一个名为LSC(Landmark-based Spectral Clustering)的可扩展的谱聚类算法,其核心思想是选取p(p<<n)个代表性数据点作为landmark,将剩余数据点表示为这些landmark的线性组合,然后使用基于landmark的表示有效地计算数据的谱嵌入(spectral embedding)。并且整体的算法时间复杂度与输入呈线性关系,构图需要 O ( p n m ) O(pnm) O(pnm),计算特征值需要 O ( p 3 + p 2 n ) O(p^3 + p^2n) O(p3+p2n)。
算法流程: 首先在数据集X中随机选取或者利用K-Means选取p个landmark;计算landmark与剩余数据之间相似度矩阵 Z Z Z;计算得到 Z Z T ZZ^T ZZT的前k个特征向量A,并根据公式【详见原文】得到最终的特征向量 B B B;将 B B B中每一行视为一个数据点,执行k-means聚类得到最终的结果。
Landmark-based Spectral Clustering
我们尝试设计具有如下性质的亲和矩阵:
W
=
Z
^
T
Z
^
Z
^
∈
R
p
×
n
,
p
<
<
n
(1)
W = \hat Z^T \hat Z \quad \hat Z ∈ R^{p×n} , p << n \tag{1}
W=Z^TZ^Z^∈Rp×n,p<<n(1)
Landmark-based Sparse Coding
数据矩阵
X
=
[
x
1
,
⋅
⋅
⋅
,
x
n
]
∈
R
m
×
n
X = [x_1, ··· , x_n] ∈ R^{m×n}
X=[x1,⋅⋅⋅,xn]∈Rm×n,矩阵分解可以将X近似分解为
U
∈
R
m
×
p
U ∈ R^{m×p}
U∈Rm×p、
Z
∈
R
p
×
n
Z ∈ R^{p×n}
Z∈Rp×n
X
≈
U
Z
X ≈ U Z
X≈UZ
U的每一列都可以被视为一个基向量,它捕捉数据中更高层次的特征,Z的每一列都是原始输入相对于新基的p维表示。测量近似值的常用方法是通过矩阵Frobenius范数||·||。因此,矩阵分解可以定义为如下优化问题:
min
U
,
Z
∣
∣
X
−
U
Z
∣
∣
2
(2)
\min_{U,Z} ||X − UZ||^2 \tag{2}
U,Zmin∣∣X−UZ∣∣2(2)
由于每个基向量(U的列向量)都可以看作是一个概念,稠密矩阵Z表示每个数据点都是所有概念的组合。这与我们的常识相反,因为大多数数据点只包括几个语义概念。稀疏编码(SC)是最近流行的一种矩阵分解方法,试图解决这个问题。稀疏编码在优化问题(2)中增加了Z的稀疏约束,具体来说就是A的每一列。这样SC就可以学习到一个稀疏表示。SC在数据表示方面有几个优势。首先,它产生稀疏表示,这样每个数据点被表示为少量基向量的线性组合。因此,数据点可以以一种更优雅的方式解释。其次,稀疏表示自然是一种允许快速检索的索引方案。第三,稀疏表示可以过完备,提供了广泛的生成元素。广泛的范围可能会使信号表示更加灵活,在信号提取和数据压缩等任务中更有效。
然而,求解具有稀疏约束的优化问题(2)非常耗时。现有的大多数方法都是迭代计算U和Z。显然,这些方法不能用于光谱聚类。
基向量(U的列向量)与原始数据点具有相同的维数。我们可以将基向量作为数据集的地标点。从数据集中选择地标点最有效的方法是随机抽样。除了随机选择外,还提出了几种路标点的选择方法。例如,我们可以使用k-means算法先对所有的数据点进行聚类,然后以聚类中心作为里land-mark点。但是,这些方法中的许多都是计算昂贵的,并且不能扩展到大型数据集。因此,我们将重点放在随机选择方法上,尽管在我们的实证研究中提出了随机选择和基于k-means的地标选择之间的比较。
假设我们已经有了地标矩阵U,我们可以通过求解优化问题(2)来计算表示矩阵z。通过固定U,优化问题成为一个约束(稀疏约束)线性回归问题。有很多算法可以解决这个问题。然而,这些优化方法仍然很耗时。在我们的方法中,我们简单地使用Nadaraya-Watson核回归来计算表示矩阵Z。
对于任何数据点
x
i
x_i
xi,我们通过下式得到近似的
x
^
i
\hat x_i
x^i,
x
^
i
=
∑
j
=
1
p
z
j
i
u
j
(3)
\hat x_i = \sum ^p_{j=1} z_{ji}u_j \tag{3}
x^i=j=1∑pzjiuj(3)
u
j
u_j
uj是
U
U
U的第
j
j
j列。这里假设,当
x
i
x_i
xi更接近
u
j
u_j
uj,
z
j
i
z_{ji}
zji应该更大;
u
j
u_j
uj不是
x
i
x_i
xi的
r
(
≤
p
)
r(≤ p)
r(≤p)近邻,
z
j
i
=
0
z_{ji}=0
zji=0这种限制自然会导致稀疏表示矩阵Z。
U
<
i
>
∈
R
m
×
r
U_{<i>} ∈ R^{m×r}
U<i>∈Rm×r是由
x
i
x_i
xi的
r
r
r个最近 landmarks 组成的
U
U
U的子矩阵。
z
j
i
z_{ji}
zji的计算公式:
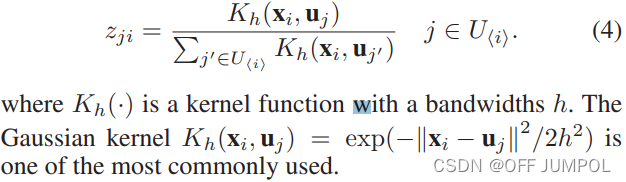
Spectral Analysis on Landmark-based Graph
我们有基于landmark的稀疏表示 Z ∈ R p × n Z∈ R^{p×n} Z∈Rp×n 现在,我们简单地计算图矩阵:
W
=
Z
^
T
Z
^
(5)
W = \hat Z^T \hat Z \tag{5}
W=Z^TZ^(5)
可以进行非常有效的特征分解。在算法中,我们选择
Z
^
=
D
−
1
/
2
Z
\hat Z = D^{−1/2}Z
Z^=D−1/2Z,其中
D
D
D是Z的行的和。注意在上一节中,
Z
Z
Z的每一列和为1,因此
W
W
W的度矩阵为
I
I
I,即图被自动归一化。
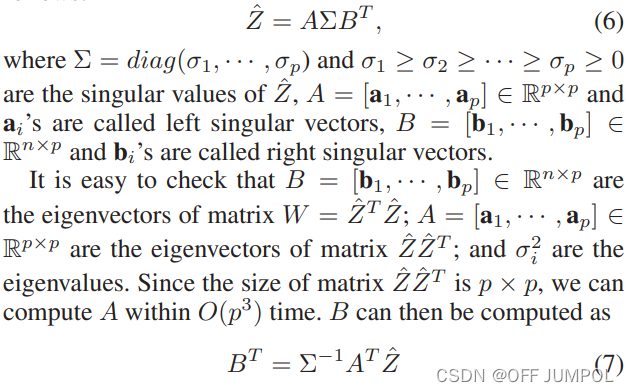
对
Z
^
\hat Z
Z^进行SVD(奇异值分解)分解:
参考链接:
初探“谱聚类”算法(无公式)















 1924
1924











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









