










- Usb_cam与Kinova 手眼标定,环境如下图:
End effector–> Camera Transformation
translation:
x: -0.000775836898723
y: 0.0965885181473
z: -0.0975828459396
rotation:
x: -0.107670140082
y: -0.0154389231235
z: 0.993642357238
w: 0.0290455932839
以镜头的视角看,光心出去的方向为Z+, 右为X+
以人眼为例,右眼看出去的方向为Z+,右眼至右耳的方向为X+

- Question 为何Aruco-ros二维码识别可以识别出位置与姿态信息?可以仅仅通过物体的像素坐标就能得到相机坐标?Zc+这个值怎么得到的?
- 转换关系验证:
相机位姿为定的,移动Marker至不同位置,计算根据Aruco反馈的Marker Pose计算Marker相对于机械臂基座的位姿。
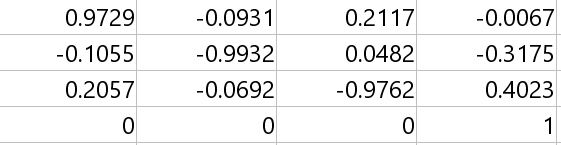
T(End-Came):

T(Base-End):
Marker Position:

Calculated Base Position:

验证结果及其不准:
Y值偏差较大,而且Marker距离Kinova距离的远近不同,Y值的差异程度也不同!!!















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









