







Apollo EDU-Pre发行版是为开发者能够对Apollo源码学习和实验而准备的一个轻量级发行版,其中包含Apollo Env Container(Apollo环境容器)的部署和使用脚本、Apollo Core(Apollo核心组件包)的安装脚本以及负责核心功能的edu-launch。
该教程基于该学习版工程进行搭建
(一) Ubuntu安装Apollo EDU-Pre 发行版操作指南
前提条件:安装 Ubuntu Linux
Apollo推荐使用版本为18.04,作者使用环境为ubuntu20.04
步骤一:下载Apollo EDU发行版
1.1 下载EDU-Pre安装文件
文件地址:点击下载
1.2 启动ubuntu,在命令行终端中执行脚本安装,执行指令如下所示
bash apollo-edu-install.sh
这里我新建了一个apollo文件夹方便管理相关文件,将下载好的sh文件拷贝到apollo文件夹,之后在该文件夹内执行以上命令。执行完成后,脚本会自动下载并解压Apollo EDU-Pre发行版。
步骤二:安装及配置docker
假如您的电脑已经安装并配置好了docker,可以略过此步,如果没有正确安装及配置,请运行以下两个步骤:
2.1 进入脚本文件夹
cd apollo-edu/scripts
2.2 在该目录中执行以下命令配置docker
bash docker_install.sh
ps:由于安装docker需要sudo权限,会出现以下提示,需要输入密码:

安装docker过程中可能会出现重启电脑的提示,根据提示操作即可,如果一切顺利,最终会见到类似下图的提示:

如果需要使用nvidia GPU运算,还需要安装nvidia-docker

github链接https://github.com/NVIDIA/nvidia-docker
点击installation guide
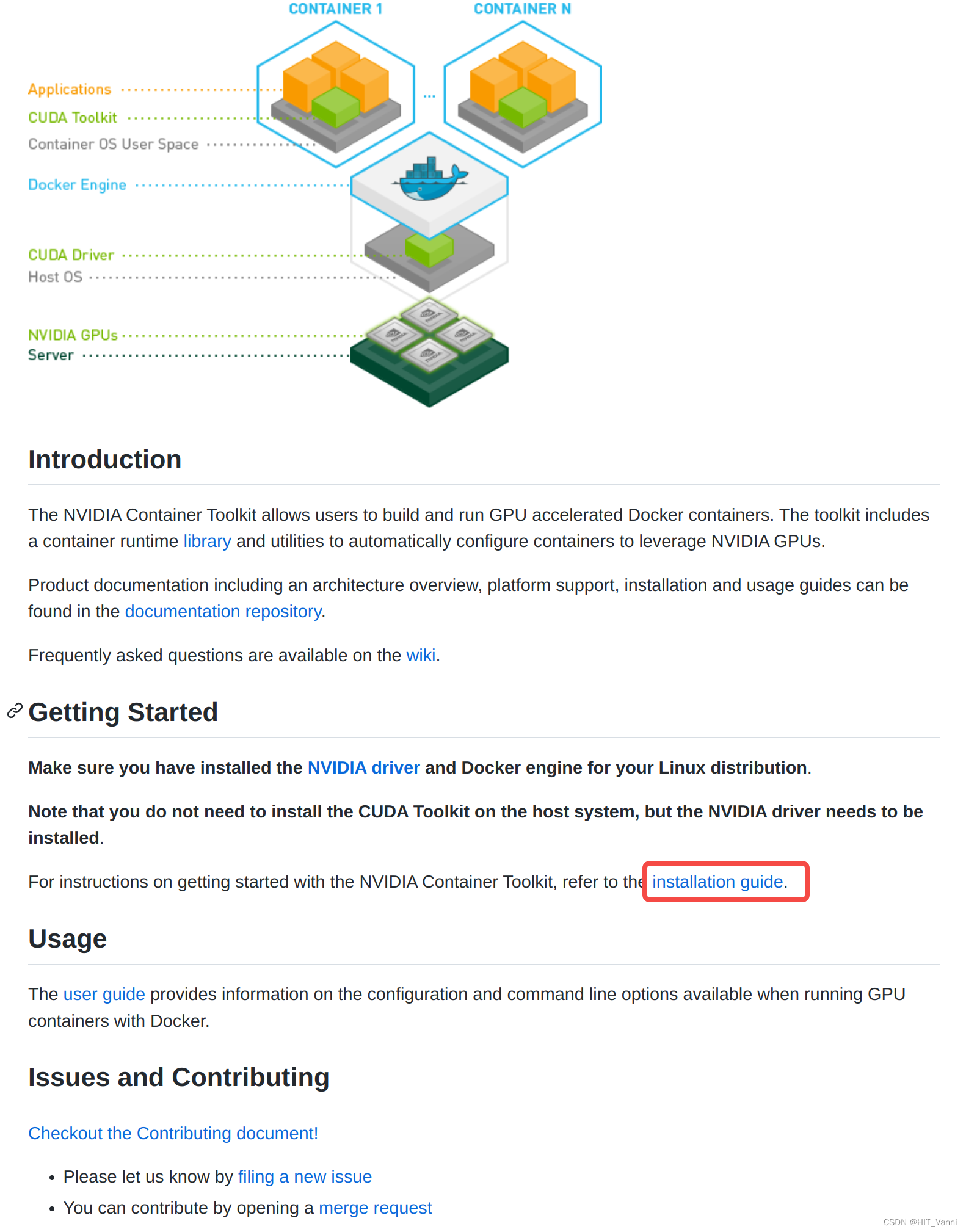
安装nvidia-docker,前提是已安装nvidia驱动以及docker
distribution=$(. /etc/os-release;echo $ID$VERSION_ID) && curl -fsSL https://nvidia.github.io/libnvidia-container/gpgkey | sudo gpg --dearmor -o /usr/share/keyrings/nvidia-container-toolkit-keyring.gpg && curl -s -L https://nvidia.github.io/libnvidia-container/$distribution/libnvidia-container.list | sed 's#deb https://#deb [signed-by=/usr/share/keyrings/nvidia-container-toolkit-keyring.gpg] https://#g' | sudo tee /etc/apt/sources.list.d/nvidia-container-toolkit.list
sudo apt-get update
sudo apt-get install -y nvidia-docker2
步骤三:启动环境容器并进入
3.1 在scripts目录中执行以下命令启动docker环境
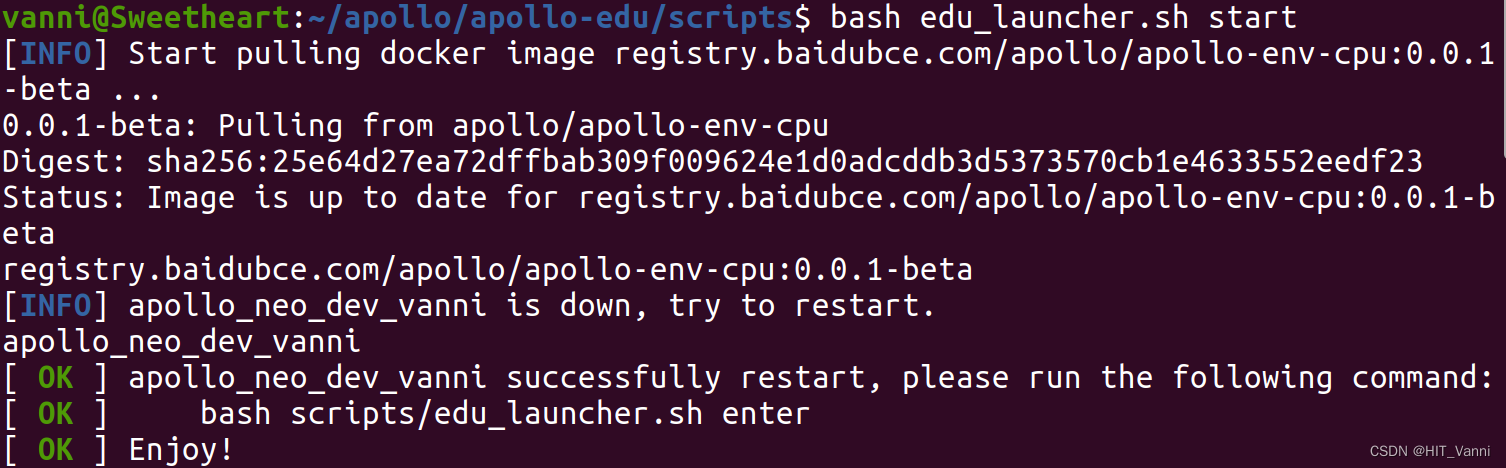
bash edu_launcher.sh start
如果一切正常,将会见到类似下图的提示:Enjoy!
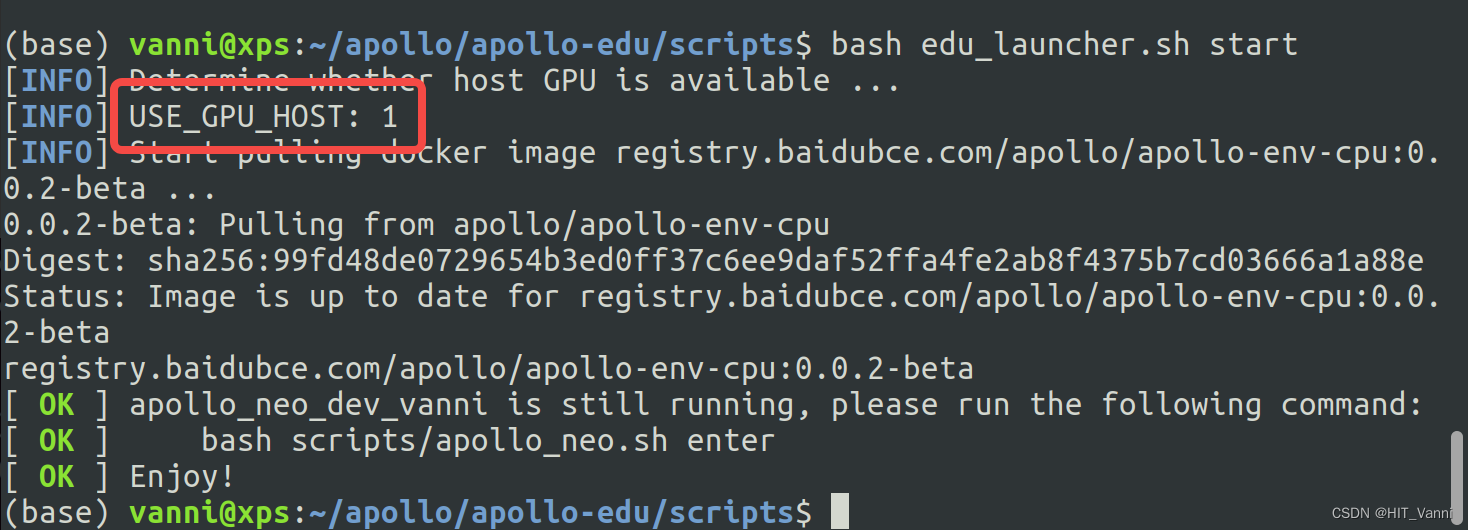
如果安装了nvidia-docker,会出现USE_GPU_HOST
3.2 启动环境完毕后,在scripts目录下执行以下命令进入docker环境
bash edu_launcher.sh enter
脚本执行成功后,将显示以下信息,您将进入 Apollo 的运行容器:
user_name@in-dev-docker:/apollo_workspace#

步骤四:安装Apollo core
Apollo core是Apollo v8.0-pre的核心组件集,现在包括:
- cyber模块
- common模块
- common_msg模块
- Apollo build-tool:构建Apollo v8.0-pre的构建工具
在apollo_workspace目录下,通执行以下安装Apollo core的命令:
bash scripts/apollo_neo.sh install_core
(二) 使用Dreamview查看数据包
前提条件
本文档假设您按照安装 Apollo EDU-Pre 发行版, 并且 Apollo docker环境已经正常运行,若没有启动 Apollo docker环境,请执行以下命令:
bash scripts/edu_launcher.sh start
步骤一:进入 Apollo Docker 环境
- 输入以下命令进入 Apollo
bash scripts/edu_launcher.sh enter
- 执行setup脚本,Apollo的运行依赖于某些环境变量,需要手动执行一遍setup脚本
source /opt/apollo/neo/setup.sh
该步骤不会有任何输出,只需要加载一下
步骤二:安装 DreamView(若已经安装,请忽略)
在同一个终端,输入以下命令,安装 Apollo 的 DreamView 程序。
sudo apt install apollo-neo-dreamview-dev && sudo apt install apollo-neo-monitor-dev
步骤三:启动 DreamView
在同一个终端,输入以下命令,启动 Apollo 的 DreamView 程序。
bash scripts/apollo_neo.sh bootstrap
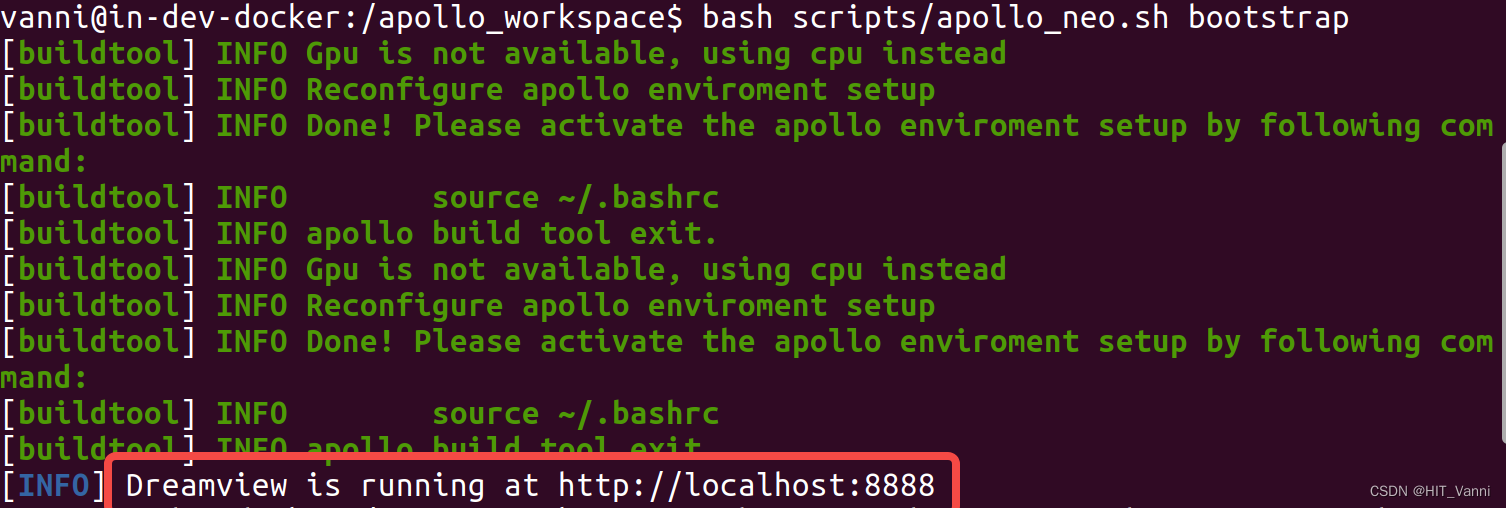
运行后会有提示DreamView 运行在http://localhost:8888
步骤四:下载 Apollo 的演示包
Record 是 Apollo 记录数据的一种数据格式。
以 .record 为后缀的文件就是我们说的 record 数据包。
在命令行中,输入下面的命令,下载 record 数据包:
wget https://apollo-system.cdn.bcebos.com/dataset/6.0_edu/demo_3.5.record
步骤五:播放 Apollo 的演示包
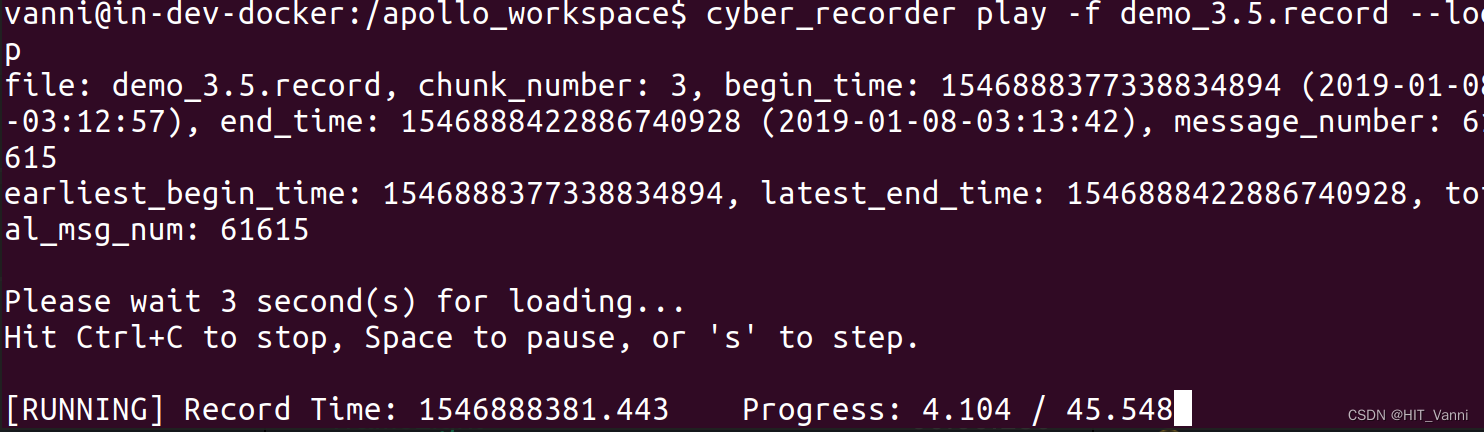
cyber_recorder play -f demo_3.5.record --loop
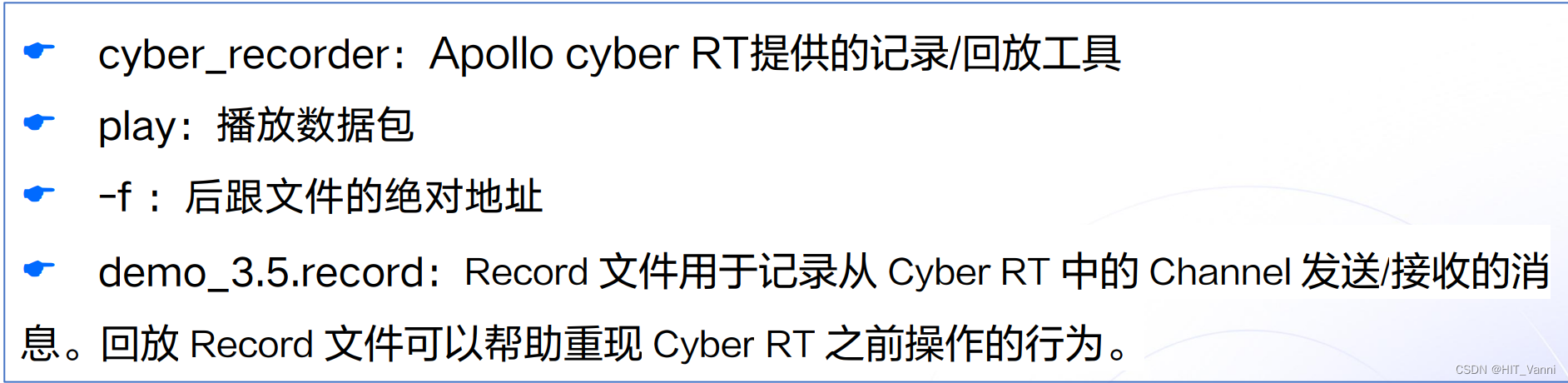
选项 --loop 用于设置循环回放模式。
跑起来之后会输出以下提示:
步骤六:使用 DreamView 查看数据包
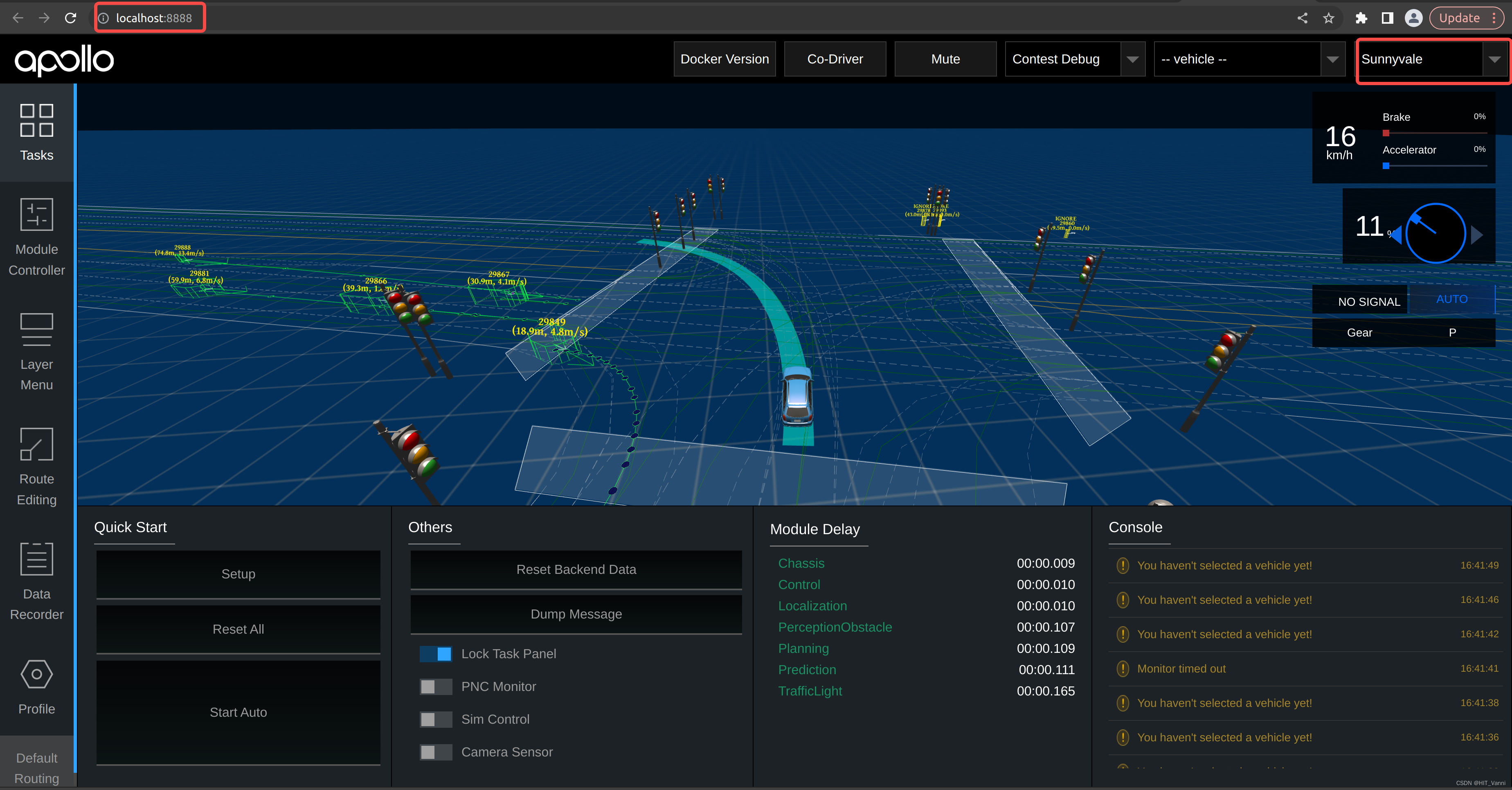
在浏览器中输入 http://localhost:8888,访问 Apollo DreamView:
地图选择Sunnyvale,运行情况如下图所示:
(三) planning模块的安装和仿真调试
步骤一:进入 Apollo Docker 环境
- 输入以下命令进入 Apollo Docker环境
bash scripts/edu_launcher.sh enter
步骤二:对planning源码包进行编译
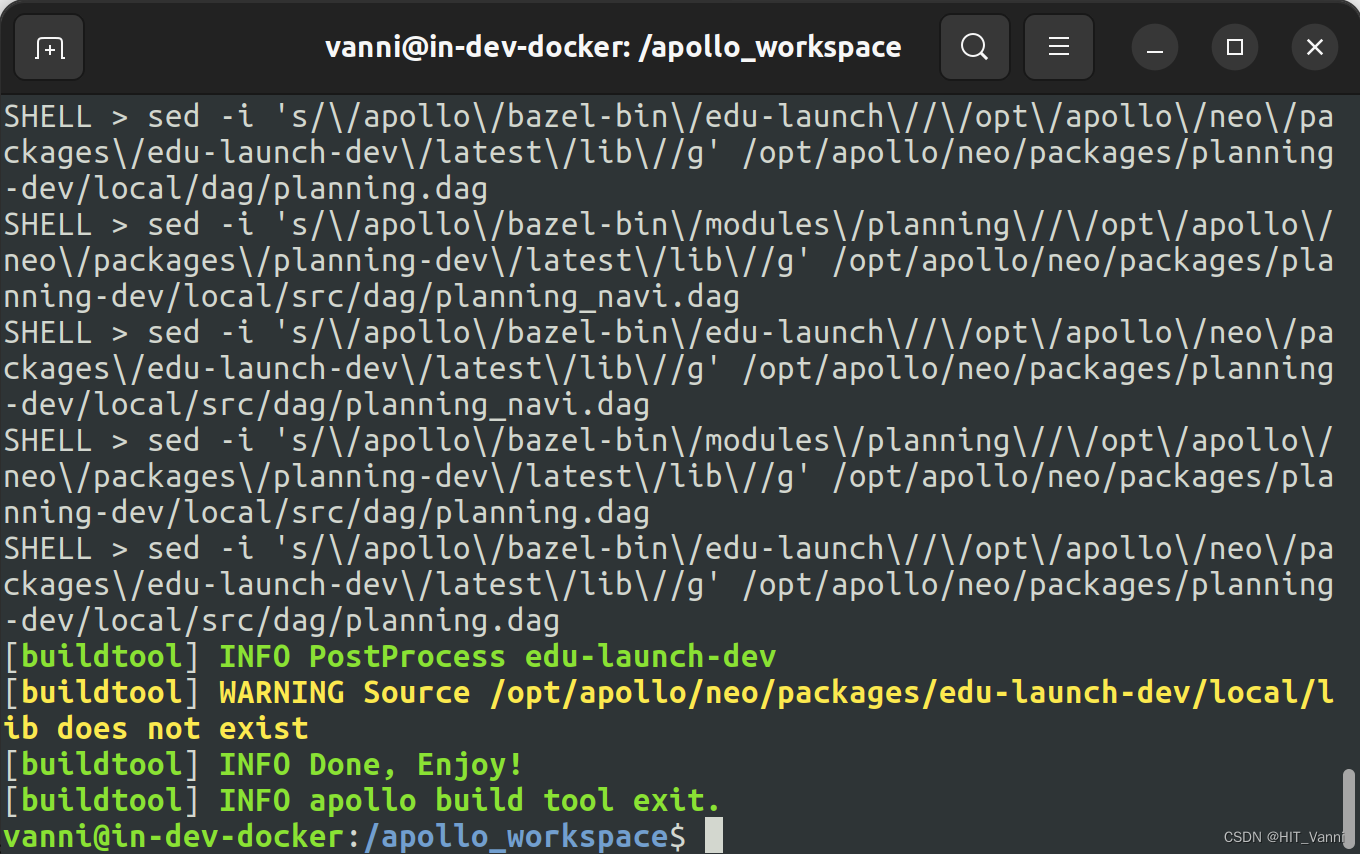
bash scripts/edu_launcher.sh build planning
该命令指定了build tool需要引入planning的源码并进行编译,编译后输出enjoy!
除了planning模块外,目前还引入dreamview,routing,task_manager和monitor等模块,具体可以输入以下命令进行查看:
bash scripts/edu_launcher.sh build -h
*调用脚本编译命令时,当前所在目录即为工作空间目录,请务必在工作空间下使用脚本编译命令。
*注:
- 调用脚本编译命令时,当前所在目录即为工作空间目录,请务必在工作空间下使用脚本编译命令。
- 如果您使用的是windows wsl2,有可能会在编译过程中遇到缺少/run/shm文件夹导致的编译失败,手动创建该文件,然后重新编译即可。
Apollo的编译工具会自动分析所有所需要的依赖,自动下载并生成必要的依赖信息文件,首次编译需要从网上拉取部分依赖包,因此受网速与电脑配置影响大概需要40分钟左右,请耐心等待编译完成,编译完成样式如图所示:
编译完成后需要手动刷新环境变量:
source ~/.bashrc
步骤三:对planning进行调试
运行dreamview:
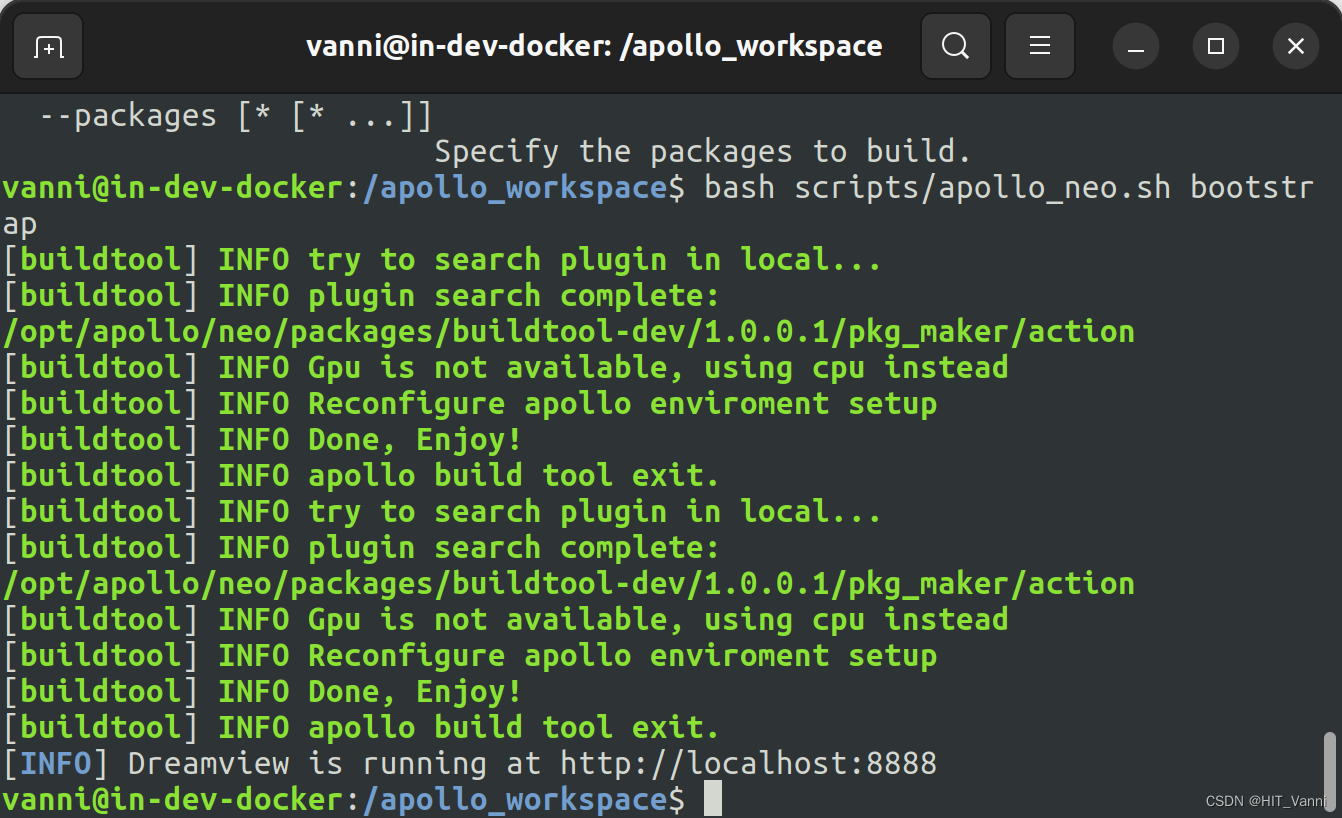
bash scripts/apollo_neo.sh bootstrap
*如果您已经启动过了dreamview,可以restart dreamview进程:
bash scripts/apollo_neo.sh bootstrap restart
此时dreamview和monitor会被自动启动,可以在浏览器输入localhost:8888打开dreamview:
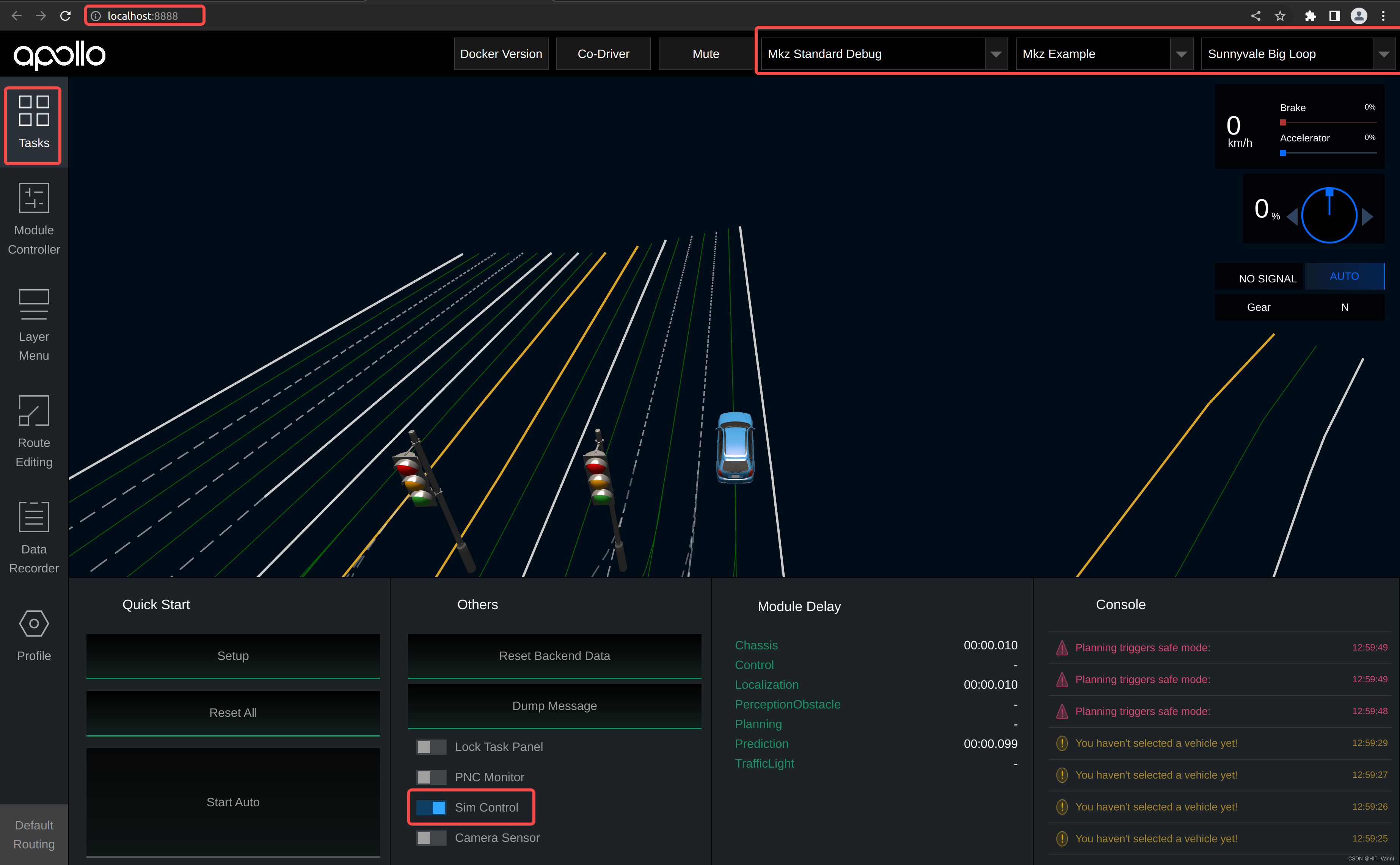
步骤四: 进入sim control仿真模式进行调试
(1)在上方菜单栏选择 MKz Standard Debug > 车辆型号选择 MkzExample > 地图选择Sunnyvale Big Loop > 点击 Tasks > 选择 Sim Control,即可进入仿真模拟控制,如下图所示:
(2)点击左侧 Module Control 栏,启动需要调试的模块进程,我们选择Planing、Routing 模块:
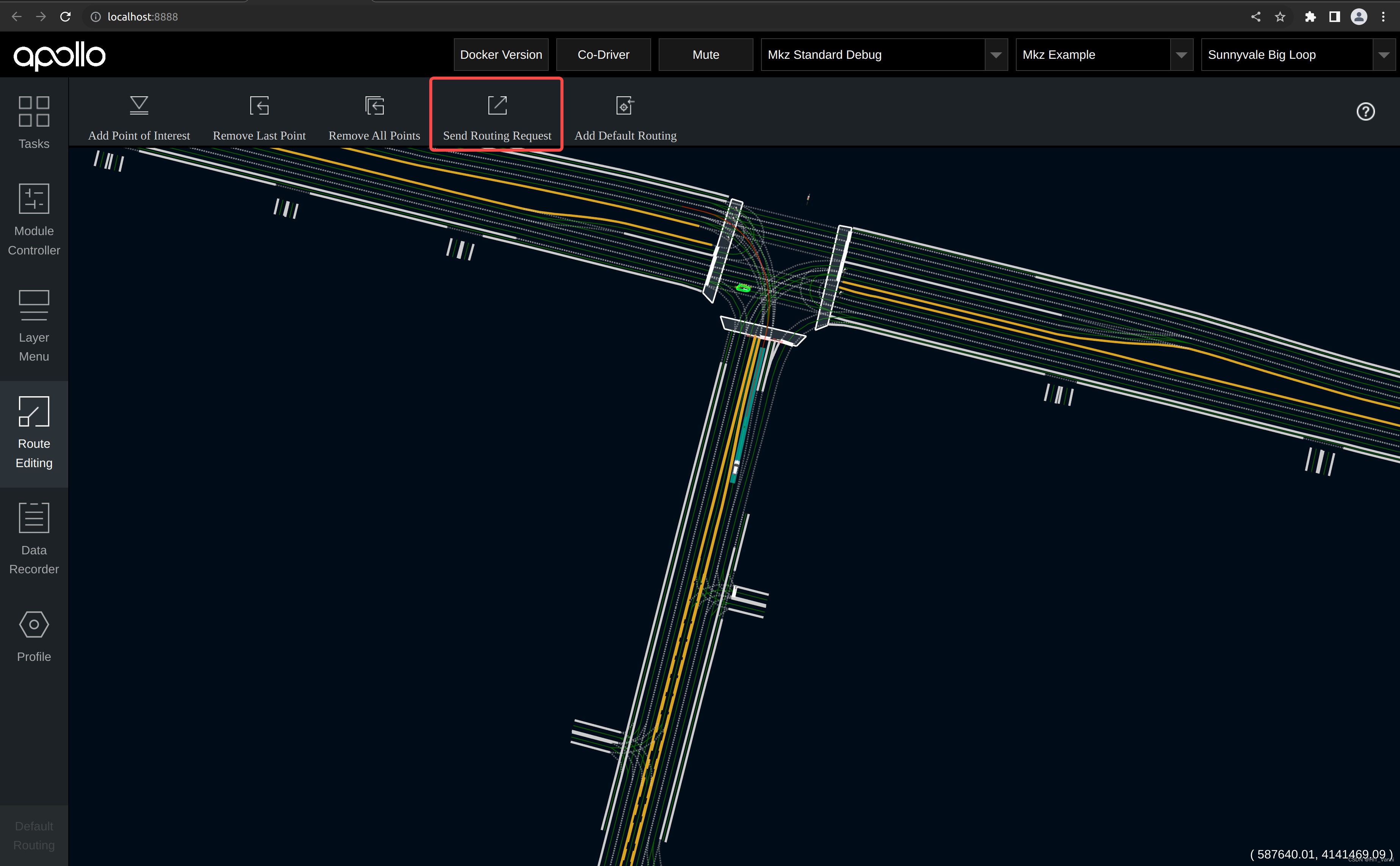
(3)设置车辆仿真行驶路径,点击左侧 Routing Editing,拖动、点击鼠标可以在地图中设置车辆行驶路径,如下图所示
(4)当点位设置完成后,点击 Send Routing Request。等待出现如下图所示,红线是routing模块在地图中搜索出的路径,浅蓝色的轨迹是 planning 模块实时规划的局部路径。
(5)此时如果想对planning模块进行调试,直接修改工作空间中的planning源码即可,源码位于工作空间中的:modules/planning
修改完毕后重新运行编译脚本:
bash scripts/edu_launcher.sh build planning
(6)重新运行dreamview中的planning模块即可。
















 491
491











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











