







Tesla AI day Planning调研
总结:
Planning方面主要介绍了三个方面:
1.Explicit Planning
该方法目前主流的Trajectory Generation一致,属于前端离散搜索+后端优化,搜索空间是Tesla感知给出的Vector Space。不过得益于Tesla硬件的优势,前端的搜索次数更多,延时更小,从讲解中可以看出主要思路是通过在线尝试,搜索满足设定评价指标:效率、安全、舒适的convex的走廊,再在走廊里优化。
2.Neural Net Planning
该方法主要是解决传统规划根据人为设定的特征,收敛到最优解过程中存在迭代次数过多或者无效尝试过多的情况,解决思路是通过End2End的方法来学习出一个更快的规划结果。并将该轨迹的分布作为初始的解传递至Explicit Planner,Tesla给出了一个AVP的例子,传统的Hybrid A*找车位过程迭代很慢,但用Neural Network学出的初始解,再进行规划的迭代很快。
3.Multi-Agents Interation
主要是解决动态环境下的交互问题,Tesla思路比较清奇:在线对其他Agent使用AutoPilot的规划方法进行轨迹规划,然后在线对所有的轨迹规划进行仿真,选择出每个Agent的最优解。该思路没有提供数学上的理论证明,即很难从数学上建模这个复杂的交互问题,但可以通过计算机强大的算力,来模拟这个交互,逼近现实。
细节:
一、Perception
carmera to vector space
8个摄像头图形由1280*960输入,36Hz处理成单帧vector space
RegNet(residual neural network):extract features
BiFPN:features fusion
Multi-scale features:
1.Feature sharing
2.De-Couples Tasks
3.Representation Bottleneck
Multi-Task Learning“HydraNets”:
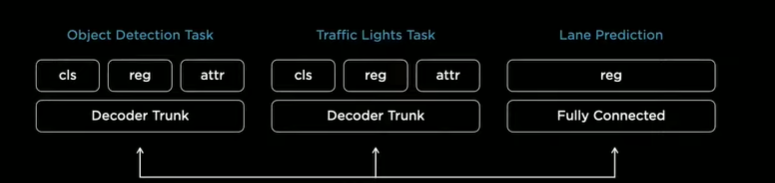
Problem:Per-Camera Detection Then Fusion
需要精确的深度信息才能更好的融合
Problem:Variations in Camera Calibration
Problem:Lack of memory
二、PnC
Key Problem in Planning
1.Non-Convex
Discrete Search
Continuous Function Optimization -> Can Converge to Local Minima
2.High-Dimensional
Discrete Search -> Computationally Inractable
Continuous Function Optimization
Solution

Using physcial model to simulate the car, search and optimize a trajectory with 10 seconds then choose the most effient, safe and comfortable trajectory.
Planning for other agents
Using the planning method of autoploit to plan the trajectory of the other agents, and estimate the best trajectory after the interatction with other agents’ trajectories.
Planning using Neural Network Heuristic

三、Labeling
1.Manual Labeling
A in-house team with one thousand people help with labeling the picture data sets. They also build a labeling tool to reconstruct the world and the label result will be simutaneously projecto to the world in vector space.
2.Auto Labeling

四、Simulation
Simulations are aimed to solving the problem when data:
















 1631
1631











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









