






Matlab 2018版本中的simulink,有个自带的车道辅助保持模块,可以直接在帮助文档中搜索lane keeping assist system,如下,该模块是以MPC控制器为基础的,通过道路曲率、纵向速度、侧向路径偏移、横摆角误差作为控制输入,输出车轮转角信号。现在分享一下通过Carsim与simulink联合仿真出来的效果。

首先看一下这个模块里面的信息,给定车辆信息作为MPC预测模块的输入,车辆信息在Carsim中可以查到,给定转角约束,预测步长以及采样时间。右下角有个controller behavior的设置,范围在0-1之间,该值越大,控制器响应越快,但可能出现超调过大的情况,越小,控制器效果越平滑,这里取0.5。

Carsim中的设置与上一篇LQR中类似,只在Carsim的输出模块中第一项更换为纵向速度
simulink中模型搭建如下:

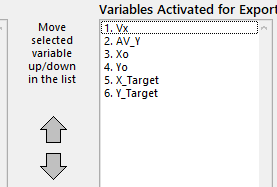
首先看一下右边carsim的输出,选择其中四个输出并将纵向速度和横摆角速度转换单位,这里车辆坐标x没有用到,我们先输出到工作空间。左边是道路曲率和侧向路径偏移计算模块,分别如下:

由于道路曲率的计算如下:
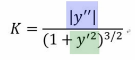
通过memory延时模块,利用导数定义的方式分别求取期望路径y的两阶和一阶导数。再通过如下模块计算出道路曲率,下面的fuction模块1即为上述曲率计算公式,function2和3是使得信号更加平滑。

通过车辆横摆角、车辆y坐标与期望的路径横摆角、期望y坐标做差,如下:得到控制器模块输入。

最后看一下carsim中的仿真效果:

车辆大致还是跟踪了期望路径,后续可以尝试在控制器设计中加入预瞄特性,以获得更好的跟踪效果。















03-05
 1681
1681
1681
07-27
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









