







前言:本文主要参考两篇文章:孙老师和谢兰天老师的文章 主要还是孙老师为主
紧组合其实就是基于伪距和伪距率的,分为载波相位伪距和码伪距无非就是伪距和伪距率的计算方式不一样。相比较而言,载波相位伪距精度高可以实现厘米级的定位,但是载波相位也有自己的麻烦之处,与码伪距紧组合的不同之处需要确定出载波相位的整周模糊度,确定好之后其实和码伪距定位一样。但是码伪距就不需要了,简单的代价也就是精度较低。
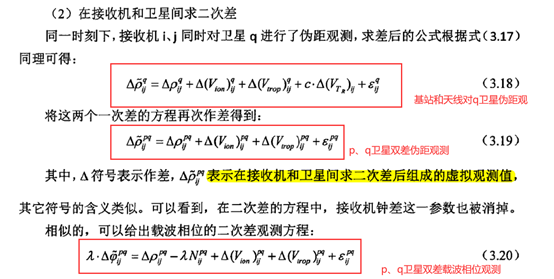
孙老师的论文中,详细论述了载波相位伪距和码伪距的线性化观测(双差)方程以及状态方程
整周模糊度的固定
在进行载波相位观测之前,首先要确定载波相位模糊度的问题,只有确定了这个问题,才能最好的使用载波相位测量,实现厘米级的定位。
整周模糊度的固定:搜索法等,这个还需要自己学习,孙老师的博士论文中可以看到。
INS双差
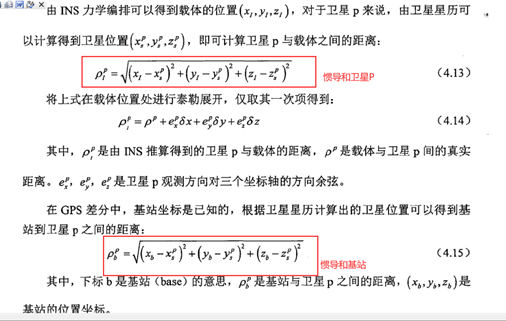
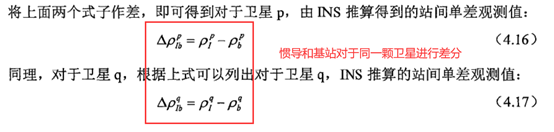
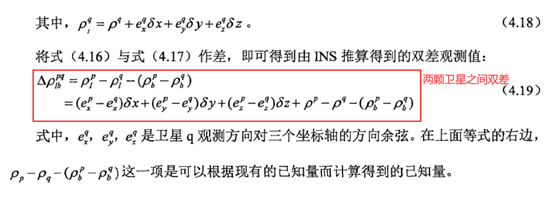
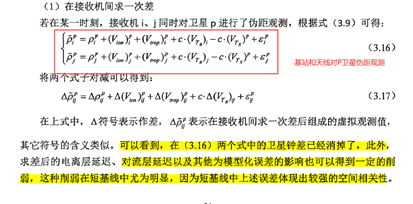
GNSS双差
卡尔曼滤波观测方程
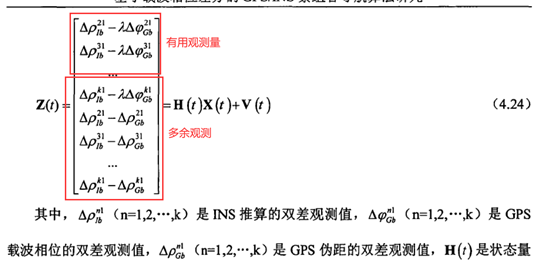
如果将整周模糊度作为状态向量进行估计,卡尔曼滤波观测量就需要多余观测,如果提前估计出整周模糊度就不用这么麻烦了 计算量也小一点,下面是有多余观测的卡尔曼滤波观测方程。















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









