







1、使用三角化去欸的那个三位i虚拟性的前提是在得到了相机的内外参数之后,SFM的下一步需要求的是特征点的对应的三维空间坐标。
因为相机参数已知,我们可以采用三角化法来求解。
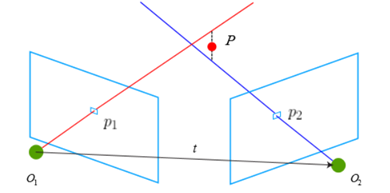
如上图,假设空间一点P(X,Y,Z)在两幅图像的像点坐标分别是$p_1(u_1,v_1),p_2(u_2,v_2)$。设相机内参数矩阵是K。设P在相机坐标系的坐标分别是$(x_1,y_1,z_1),(x_2,y_2,z_2)$,设P在相机1的深度是d1,在相机2的深度是d2。根据坐标变换公式可得:
\begin{equation}d_1
\begin{bmatrix}
u_1\\v_1\\1
\end{bmatrix}
=K
\begin{bmatrix}
x_1\\y_1\\z_1
\end{bmatrix}
\end{equation}
\begin{equation}d_2
\begin{bmatrix}
u_2\\v_2\\1
\end{bmatrix}
=K
\begin{bmatrix}
x_2\\y_2\\z_2
\end{bmatrix}
\end{equation}
假设相机1到相机2的变换矩阵是R和T,则:
\begin{equation}
\begin{bmatrix}
x_2\\y_2\\z_2
\end{bmatrix}
=R
\begin{bmatrix}
x_1\\y_1\\z_1
\end{bmatrix}
+T
\end{equation}
联立上述三个式子可得:
\begin{equation}d_2K^{-1}
\begin{bmatrix}
u_2\\v_2\\1
\end{bmatrix}
=d_1RK^{-1}
\begin{bmatrix}
u_1\\v_1\\1
\end{bmatrix}
+T
\end{equation}
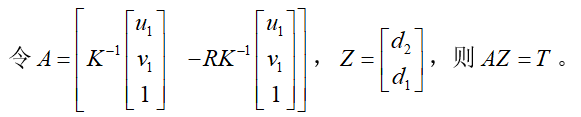
可以根据上式求解Z从而可以确定特征点的深度信息,即可以得到特征点的三维信息。















 8586
8586











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









