







人体上肢手臂DH参数表:
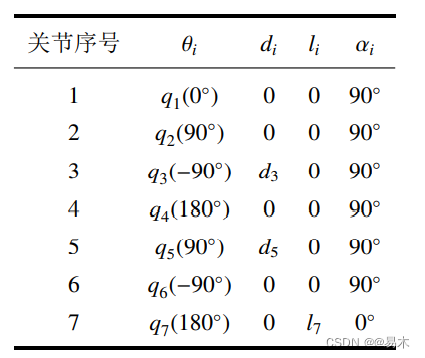
利用Matlab Rotobics Toolbox 进行建模和可视化:
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0, 'alpha', pi/2);人体上肢手臂DH参数表:
利用Matlab Rotobics Toolbox 进行建模和可视化:
L1 = Link('d', 0, 'a', 0, 'alpha', pi/2);
L2 = Link('d', 0, 'a', 0, 'alpha', pi/2);










 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4368
4368





