







机器人开发--pgv 视觉引导(Position Guided Vision)
1 介绍
1.1 简介
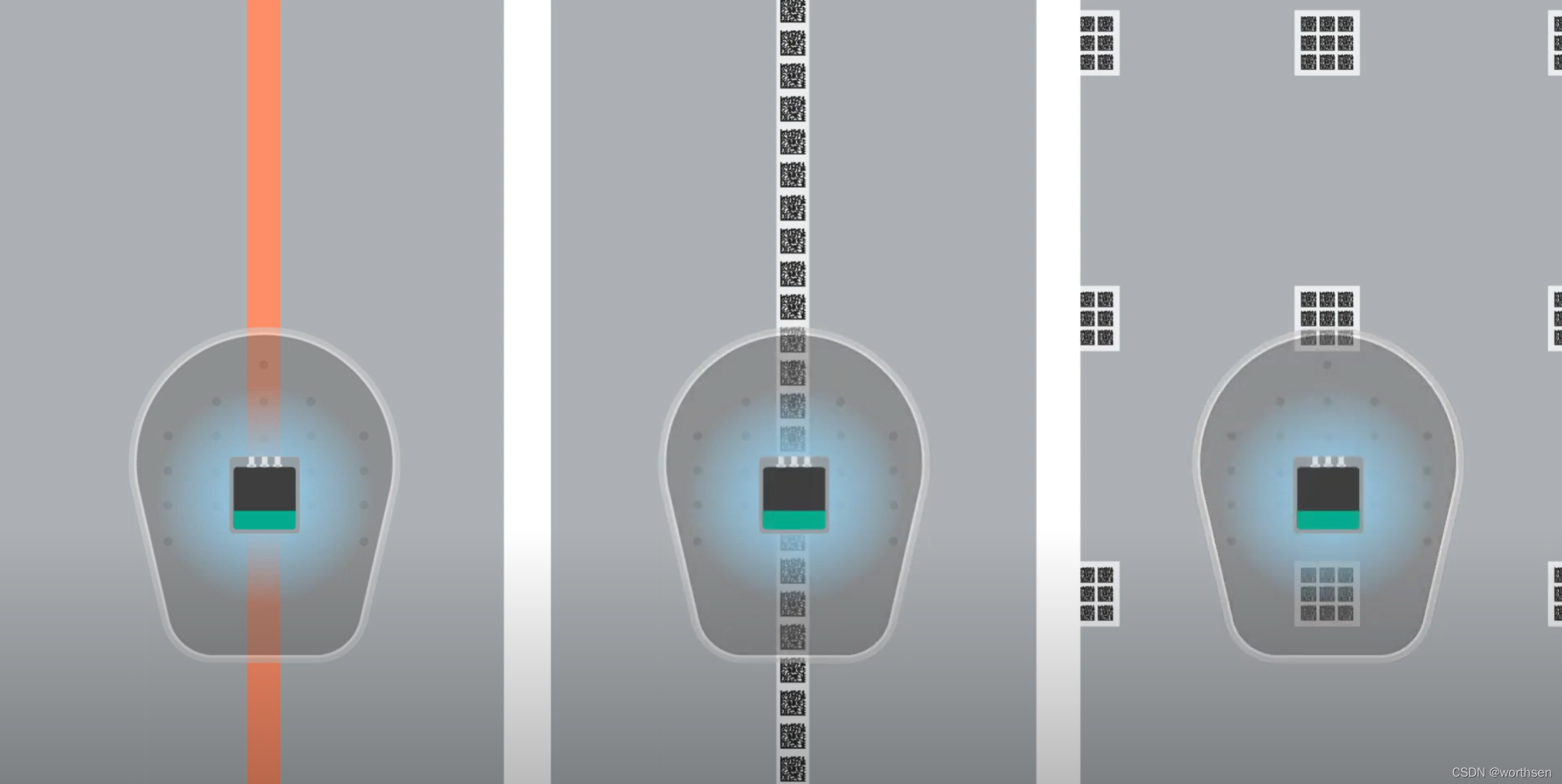
PGV读头由一个内置照明单元的摄像机系统组成,通过彩色路线跟踪带/油漆可靠地导航,即使是在高反射表面或尖锐曲线周围。
PGV用于车道彩色磁带的跟踪,用于定位二维码的处理和用于导航的控制。

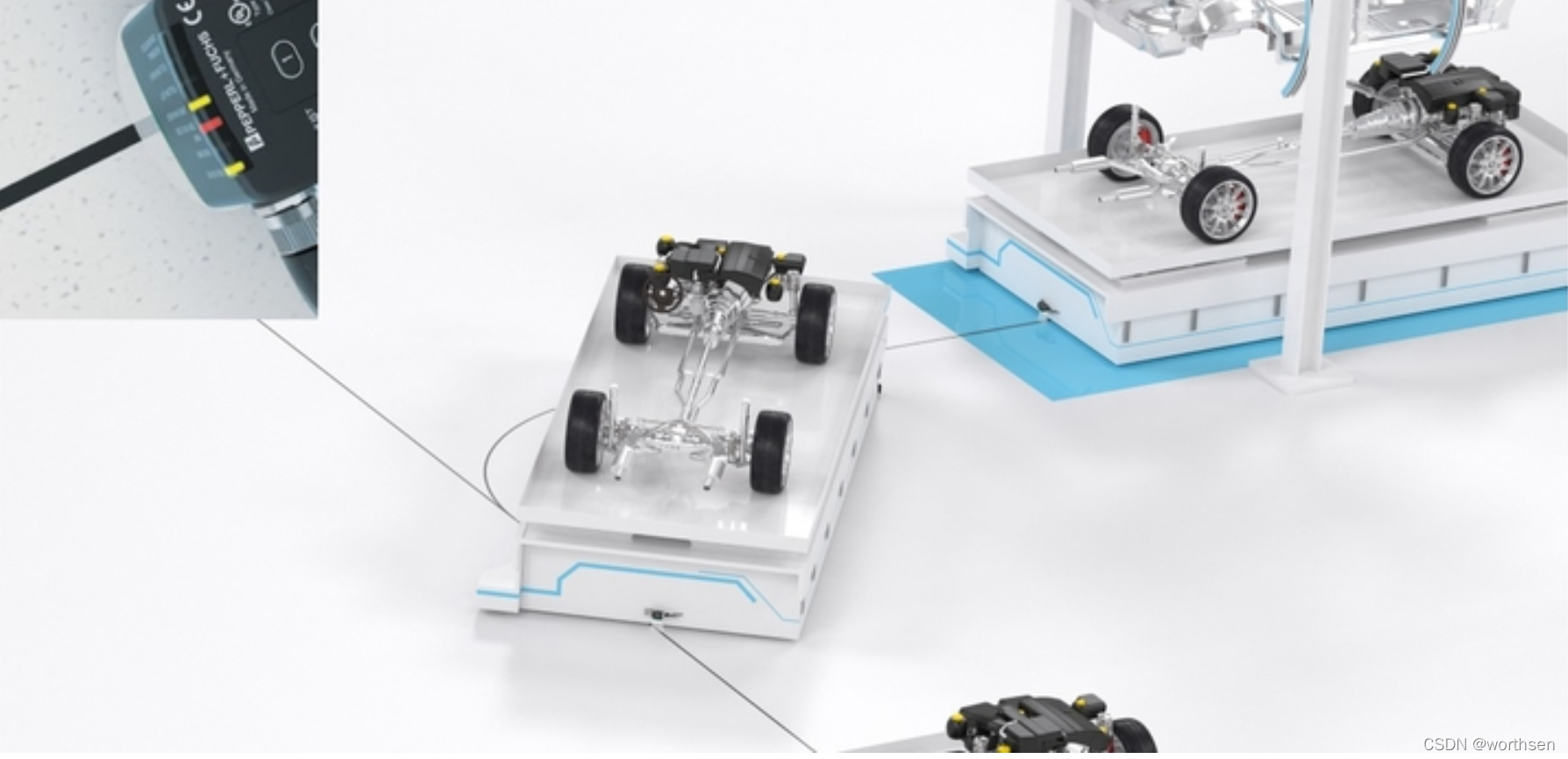
1.2 组成
读头

PGV读头坚固而紧凑。这意味着它们甚至可以安装在最小的agv上。强大的LED照明使它们对环境影响不敏感。读取头可与传感器外壳集成的所有公共接口。
码带,彩条,标签

各种颜色和长度的合适的路径跟踪磁带,二维码带和标签。

连接器
电源、数据、控制线束,及安装支架。
1.3 方案

1.4 优点
- 可靠地检测彩色路线跟踪胶带/涂料和二维码,甚至在高度反射的表面
- 卓越的外部光免疫,> 100,000勒克斯,消除了额外的对比带的需要
- 宽扫描窗口加上二维数据矩阵技术,可在损坏或脏磁带上提供无缝导航
- 紧凑的外壳适合于最小的agv
- 易于安装和安装,即插即用连接
- 兼容大多数工业协议
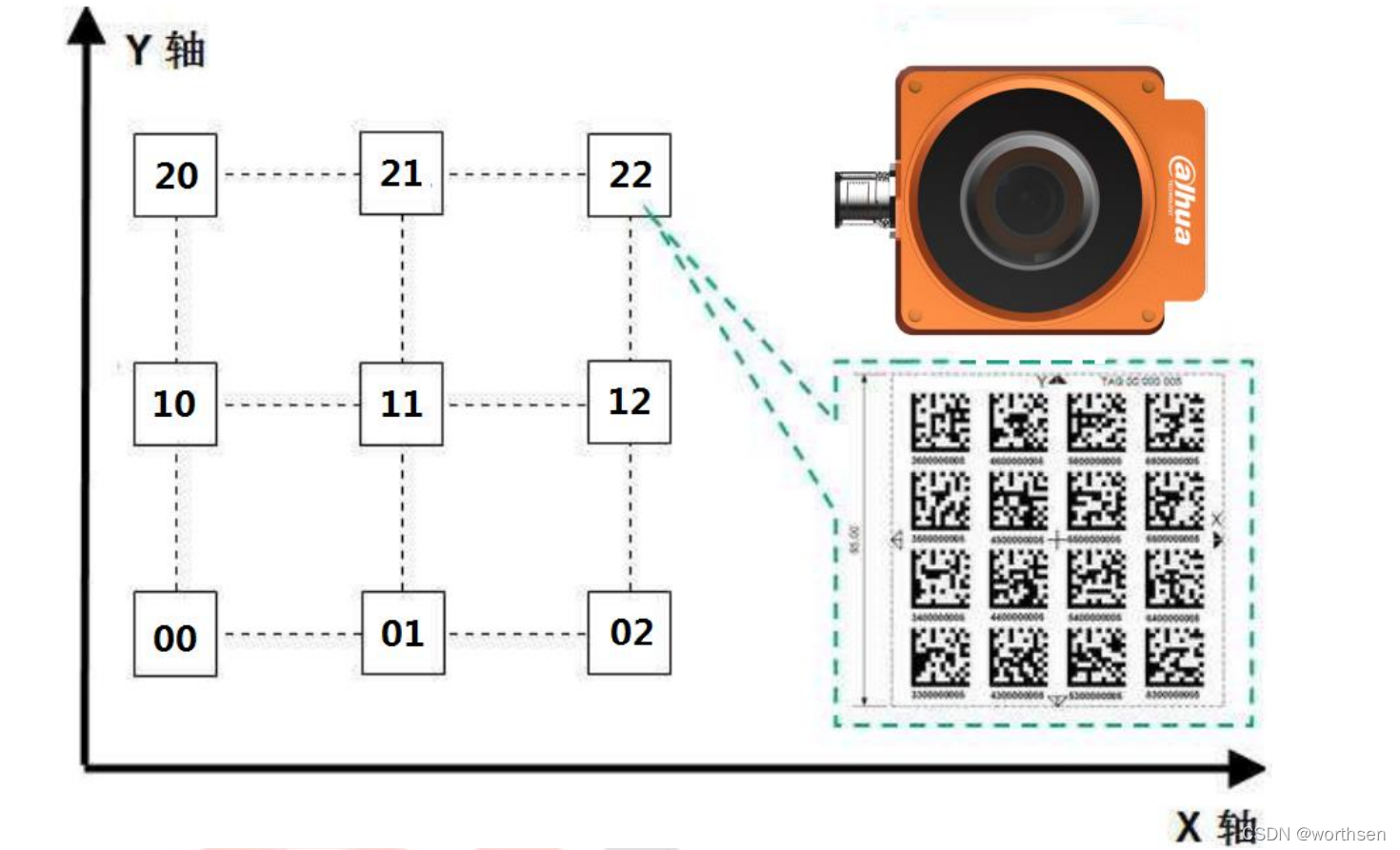
2 传感器作用
- 读二维码(id,xoff,yoff,yaw)
heading:二维码旋转弧度(0~2π)|(0~360)
yaw:偏航角(弧度)(-π/4~π/4)|(-45~45)
xoff:二维码中心点x值
yoff:二维码中心点y值 - 读彩条
3 传感器厂家
3.1 倍加福

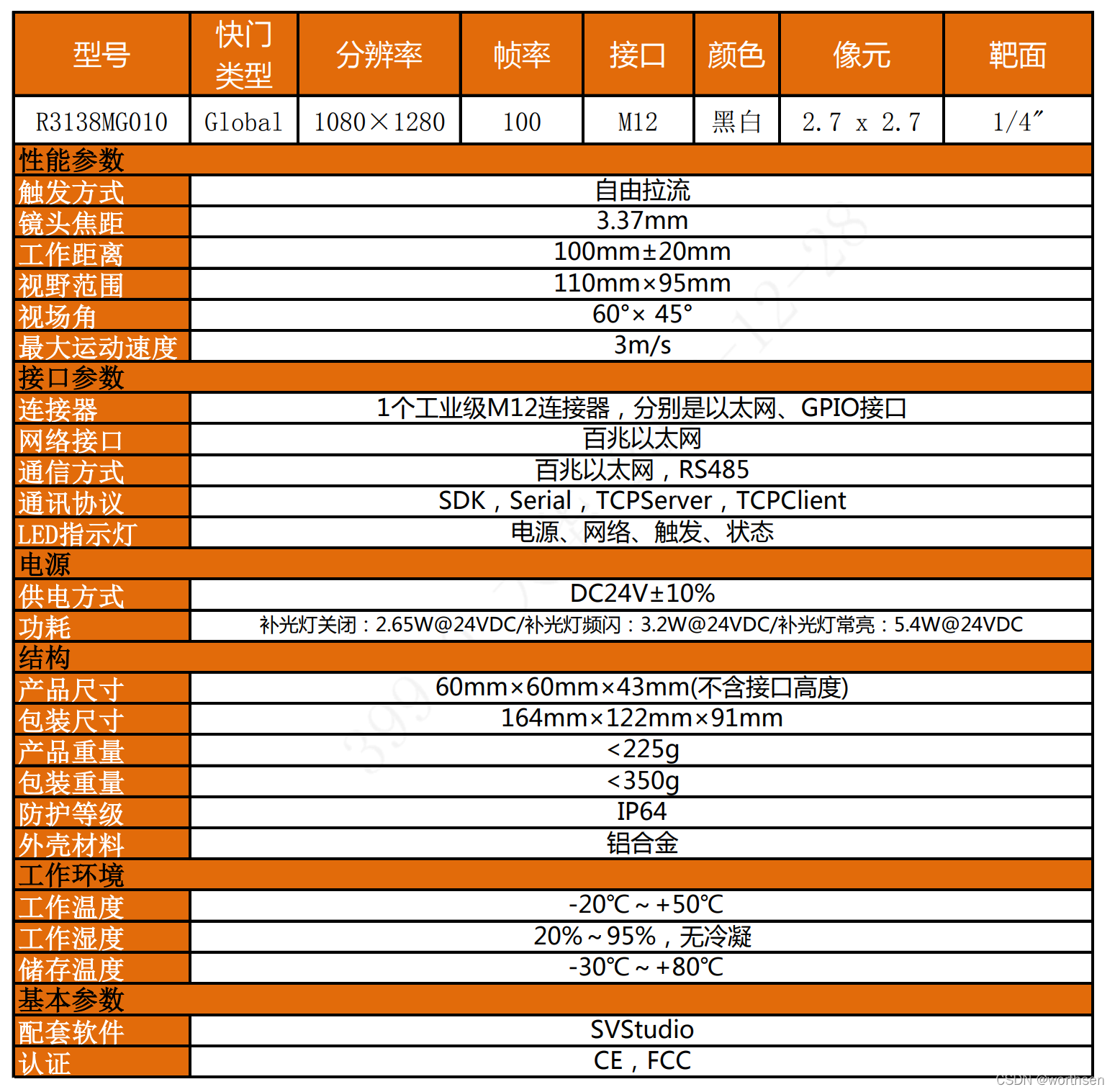
3.2 大华
- R3138MG010
- MV-R3051MG010https://assets.seer-group.com/robokit/yanshuo/%E4%B8%AD%E6%96%87%E5%A4%A7%E5%8D%8EAGV%E8%AF%BB%E7%A0%81%E5%99%A8%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8CV0.0.9-20210224144035.pdf
3.3 科尔摩根/NDC
4 传感器用户
- 仙知
- 瀚宁智能
- 等
参考
1、倍加福–位置导引视觉系统 (PGV, safePGV)
2、倍加福–Camera-Based Track Guidance (PGV)
3、PosiTrack PGV for AGVs
4、PGV for AGV Navigation
5、[1]Lin Xie,Hanyi Li,Nils Thieme.From Simulation to Real-World Robotic Mobile Fulfillment Systems,2018
6、sensopart v20
7、仙工–倍加福PGV配置
8、仙工–大华PGV配置
9、懿力创新 翰宁智能



















 6706
6706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











