







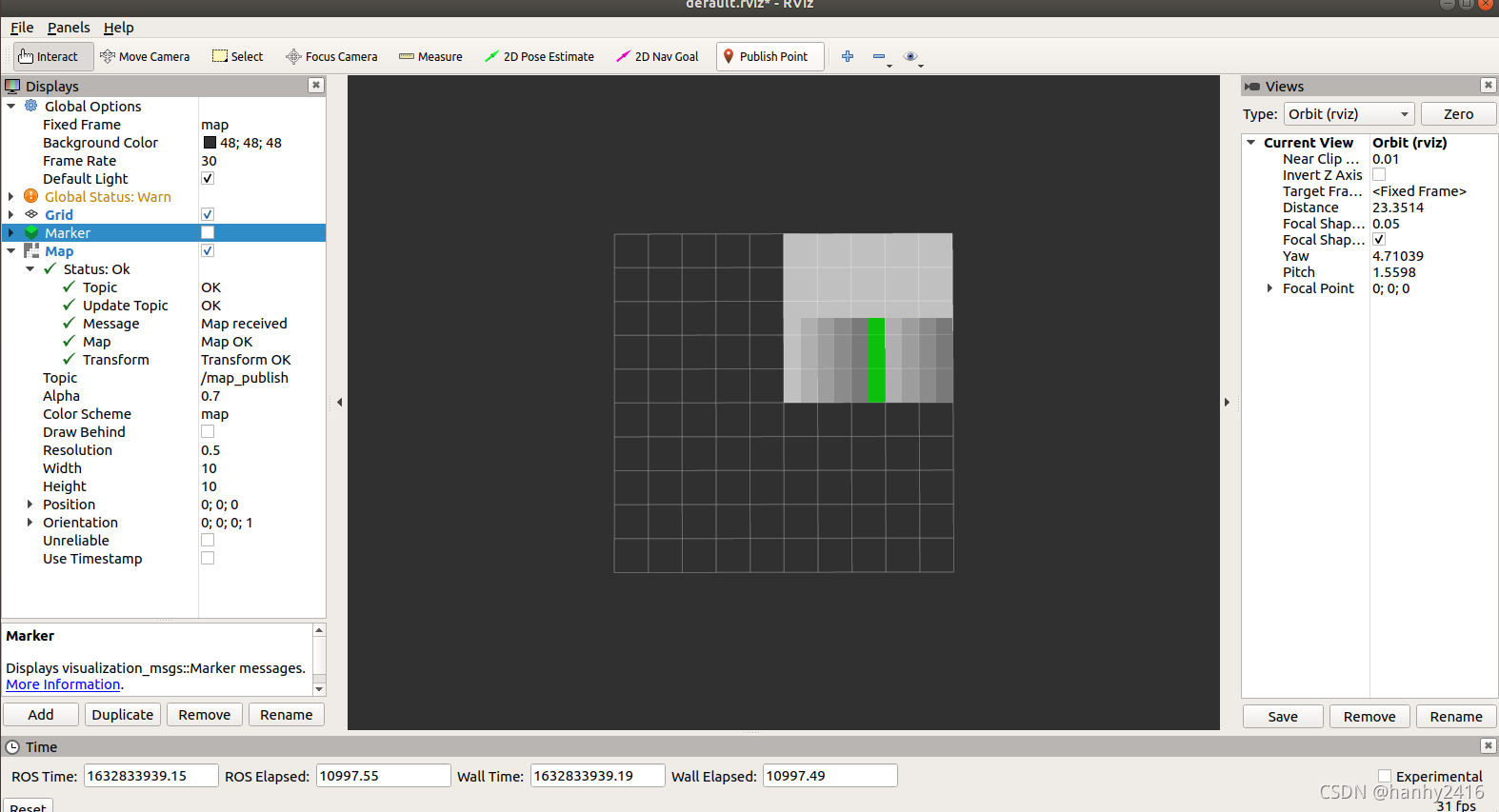
自定义OccupancyGrid
//
// Created by hhy on 2021/9/28.
//
#include <nav_msgs/OccupancyGrid.h>
#include <ros/ros.h>
#define W 10
#define H 10
int main(int argc, char **argv) {
// 初始化ROS节点 节点名字
ros::init(argc, argv, "mappublish");
// 节点句柄
ros::NodeHandle nh;
// 发布消息 话题名字 队列大小
ros::Publisher pub = nh.advertise<nav_msgs::OccupancyGrid>("map_publish", 1);
// 定义地图对象
nav_msgs::OccupancyGrid myMap;
// 地图数据
myMap.info.map_load_time = ros::Time(0);
myMap.info.resolution = 0.5;
myMap.info.width = W;
myMap.info.height = H;
myMap.info.origin.position.x = 0;
myMap.info.origin.position.y = 0;
myMap.info.origin.position.z = 0;
myMap.info.origin.orientation.x = 0;
myMap.info.origin.orientation.y = 0;
myMap.info.origin.orientation.z = 0;
myMap.info.origin.orientation.w = 0;
for (std::size_t h = 0; h < H; h++) {
for (std::size_t w = 0; w < W; w++) {
int8_t a;
if (w < W / 2)
a = 10 * w;
else if (w == W / 2)
a = 127;
else
a = (w - W / 2) * 10;
if (h < H / 2)
myMap.data.push_back(a);
else
myMap.data.push_back(0);
}
}
// frame id
myMap.header.frame_id = "map";
// 消息发布频率
ros::Rate loop_rate(1);
while (ros::ok()) {
ROS_INFO_STREAM("PUB");
pub.publish(myMap);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
保存地图
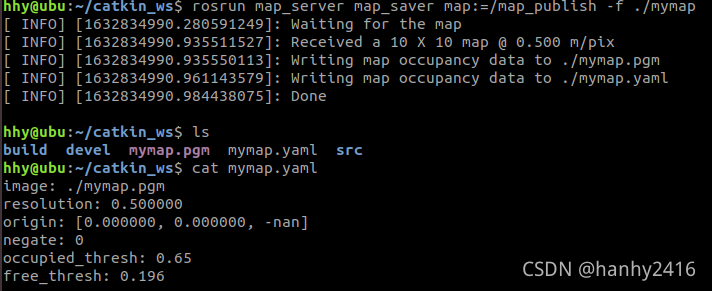
rosrun map_server map_saver map:=/map_publish -f ./mymap
map:=/map_publish 指定话题
-f ./mymap 指定保存的位置和名称
地图的yaml格式中有:
- image:包含占用数据的图像文件的路径; 可以是绝对的,或相对于YAML文件的位置
- resolution:地图的分辨率,米/像素
- origin:地图中左下像素的2-D姿态为(x,y,yaw),偏航为逆时针旋转(yaw = 0表示无旋转)。系统的许多部分目前忽略偏航。
- occupancy_thresh:占据概率大于该阈值的像素被认为完全占用。
- free_thresh:占有概率小于该阈值的像素被认为是完全自由的。
- negate:白/黑自由/占用语义是否应该被反转(阈值的解释不受影响)
roslaunch启动map_server
<launch>
<node pkg="map_server" type="map_server" name="map_server" args="-f PATH_TO_YOUR_FILE/mymap" output="screen">
<remap from="map" to="/< Map Topic >" />
</node>
</launch>
PATH_TO_YOUR_FILE填写想要保存地图的路径。
< Map Topic >填写地图的话题类型,比如用octomap_server生成的栅格地图的话题是/projected_map。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











