






 本文详细介绍了在Ubuntu虚拟机中安装ROS,ROS的RVIZ测试,以及常用的rosbag指令如录制、播放和修复。还包括了RVIZ设置的步骤,帮助读者理解和实践ROS环境。
本文详细介绍了在Ubuntu虚拟机中安装ROS,ROS的RVIZ测试,以及常用的rosbag指令如录制、播放和修复。还包括了RVIZ设置的步骤,帮助读者理解和实践ROS环境。
一、前提
基本需求
注意:
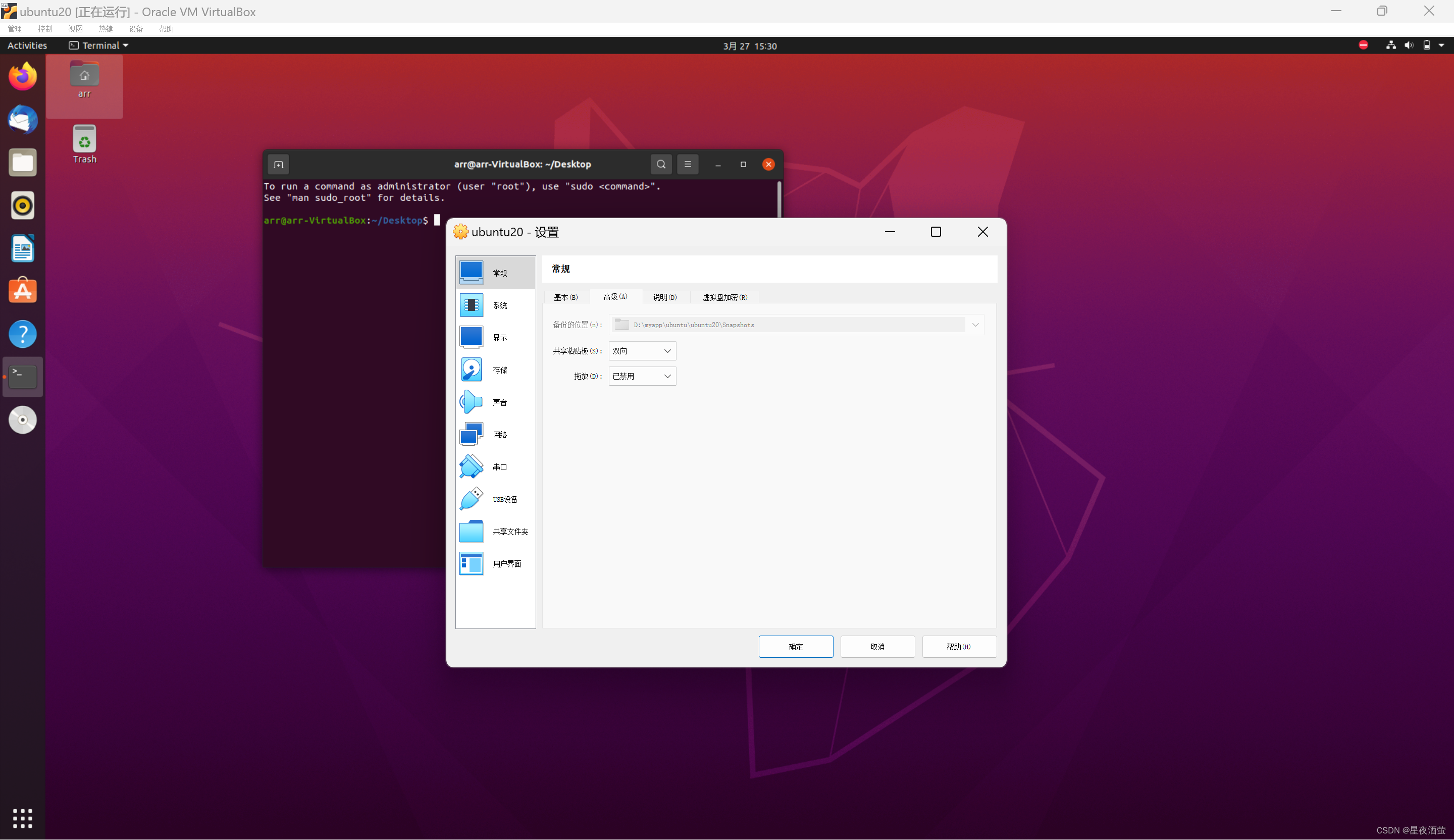
1.记得安装增强功能
2.记得打开关共享粘贴板
3.共享文件好像有点麻烦,我选择邮箱传
(3.28更改:共享文件比邮箱方便太多T T 共享文件教程
指令:
sudo mount -t vboxsf shared_file directory
4.在设置-显示里更改以下显存,这样显示更清晰,也不会黑屏
二、ROS安装
用小🐟的一键安装:
wget http://fishros.com/install -O fishros && . fishros
安装ROS1,版本选择N开头的
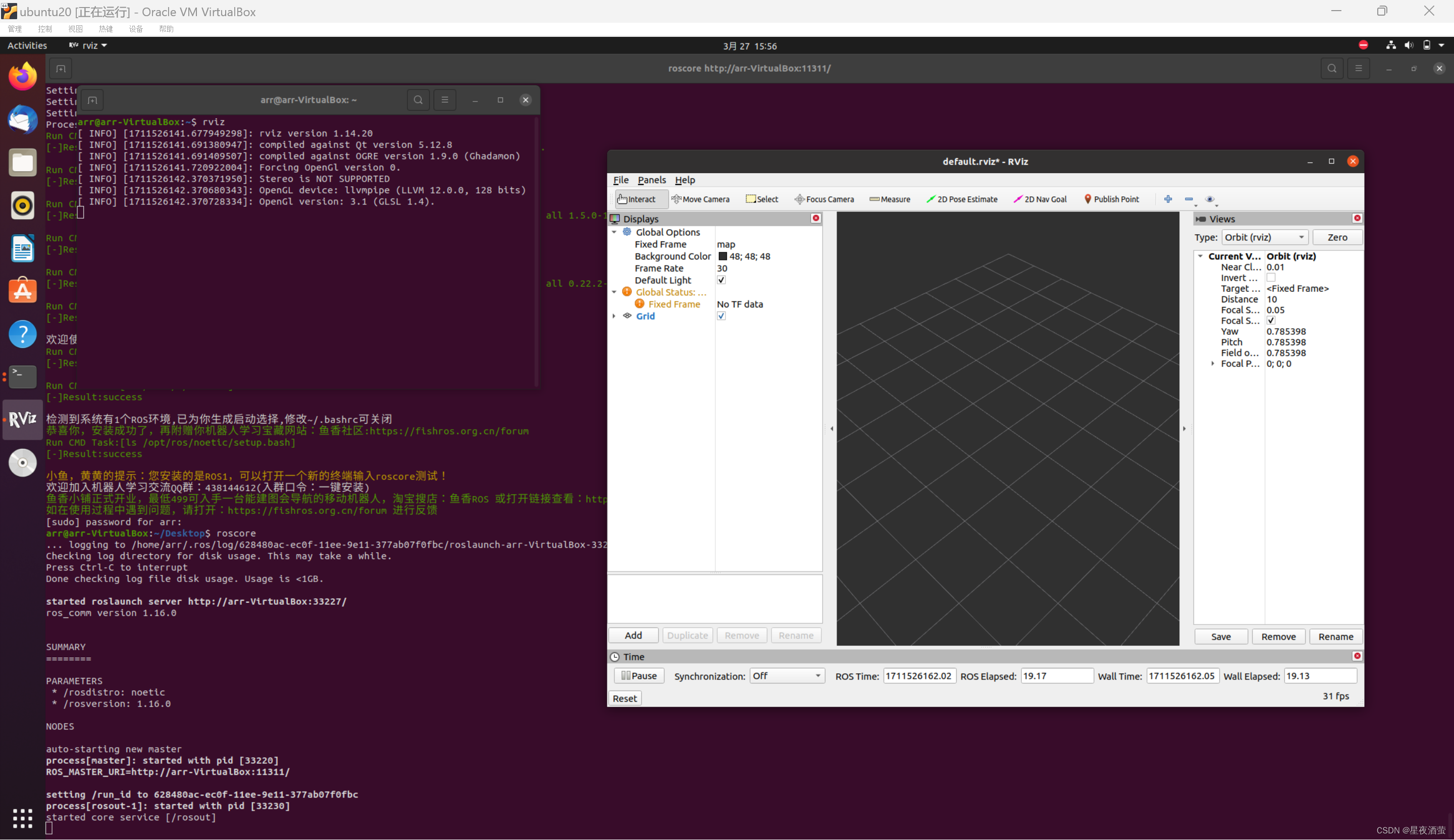
三、RVIZ测试
用一个终端运行roscore
新开一个终端运行rviz
就可以成功打开啦
四、常用rosbag指令
bag录制
1.录制所有话题数据
rosbag record -a
2.录制指定话题数据
rosbag record <topic_name1> <topic_name2> <topic_name3> …
bag播放
1.回放指定bag
rosbag play
2.回放当前目录下所有bag
rosbag play *
3.从指定时间(n = 指定时间s)开始回放bag
rosbag play -s n
4.延时指定时间(n = 延时时间s)开始回放bag
rosbag play -d n
5.播放指定时间(n = 指定秒数)的bag
rosbag play -u n
6.从指定时间(n = 开始时间s)开始播放指定时间(m = 指定播放时间s)的bag
rosbag play -s n -u m
7.按指定倍率(n = 倍率)回放bag
rosbag play -r n
bag修复
回放不成功,提示 reindex
rosbag reindex
五、RVIZ设置
1.map改为livox_frame
2.加cloudpoint2 改topic(在rosbag info里)
3.改一些设置decaytime让点云更清晰

















 8341
8341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









