









这里用齐次坐标系
平移
x
′
=
x
+
t
x
y
′
=
y
+
t
y
z
′
=
z
+
t
z
\begin{aligned} x^{\prime} &= x + tx\\ y^{\prime} &= y + ty\\ z^{\prime} &= z + tz\\ \end{aligned}
x′y′z′=x+tx=y+ty=z+tz
于是可以写出
(
x
′
y
′
z
′
1
)
=
T
(
t
x
,
t
y
,
t
z
)
(
x
y
z
1
)
=
(
1
0
0
t
x
0
1
0
t
y
0
0
1
t
z
0
0
0
1
)
(
x
y
z
1
)
\begin{pmatrix} x^{\prime}\\ y^{\prime}\\ z^{\prime}\\ 1\\ \end{pmatrix} = \mathbf{T}\left(tx,ty,tz\right) \begin{pmatrix} x\\ y\\ z\\ 1\\ \end{pmatrix}=\begin{pmatrix} 1&0&0&tx\\ 0&1&0&ty\\ 0&0&1&tz\\ 0&0&0&1 \end{pmatrix}\begin{pmatrix} x\\ y\\ z\\ 1\\ \end{pmatrix}
x′y′z′1
=T(tx,ty,tz)
xyz1
=
100001000010txtytz1
xyz1
容易验证,反着平移,也就是求逆
(
T
(
t
x
,
t
y
,
t
z
)
)
−
1
=
(
1
0
0
−
t
x
0
1
0
−
t
y
0
0
1
−
t
z
0
0
0
1
)
=
T
(
−
t
x
,
−
t
y
,
−
t
z
)
\left(\mathbf{T}\left(tx,ty,tz\right)\right)^{-1} = \begin{pmatrix} 1&0&0&-tx\\ 0&1&0&-ty\\ 0&0&1&-tz\\ 0&0&0&1 \end{pmatrix} = \mathbf{T}\left(-tx,-ty,-tz\right)
(T(tx,ty,tz))−1=
100001000010−tx−ty−tz1
=T(−tx,−ty,−tz)
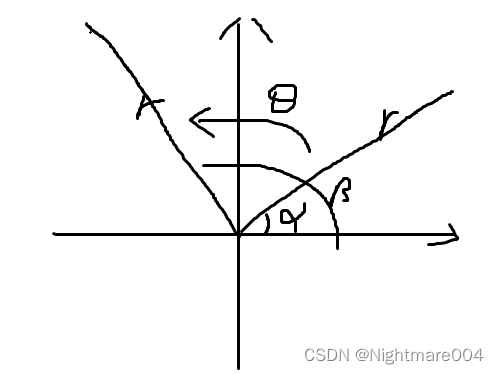
旋转
2d
绕原点逆时针旋转
x
=
r
cos
α
y
=
r
sin
α
\begin{aligned} x &= r\cos \alpha\\ y & = r\sin \alpha\\ \end{aligned}
xy=rcosα=rsinα
x
′
=
r
cos
β
=
r
cos
(
α
+
θ
)
y
′
=
r
sin
β
=
r
sin
(
α
+
θ
)
\begin{aligned} x^{\prime}&= r\cos \beta= r\cos \left(\alpha + \theta\right)\\ y^{\prime}&= r\sin \beta= r\sin\left(\alpha + \theta\right)\\ \end{aligned}
x′y′=rcosβ=rcos(α+θ)=rsinβ=rsin(α+θ)
展开后,容易写出
(
x
′
y
′
)
=
G
(
x
y
)
=
(
cos
θ
−
sin
θ
sin
θ
cos
θ
)
(
x
y
)
\begin{pmatrix} x^{\prime}\\ y^{\prime}\\ \end{pmatrix}=\mathbf{G}\begin{pmatrix} x\\ y\\ \end{pmatrix} = \begin{pmatrix} \cos \theta & -\sin\theta\\ \sin\theta & \cos\theta \end{pmatrix}\begin{pmatrix} x\\ y\\ \end{pmatrix}
(x′y′)=G(xy)=(cosθsinθ−sinθcosθ)(xy)
也就是Givens旋转变换
顺时针旋转,也就是求逆(相当于逆时针旋转
−
θ
-\theta
−θ)
G
−
1
=
G
T
=
(
cos
θ
sin
θ
−
sin
θ
cos
θ
)
\mathbf{G}^{-1} = \mathbf{G}^T = \begin{pmatrix} \cos \theta & \sin\theta\\ -\sin\theta & \cos\theta \end{pmatrix}
G−1=GT=(cosθ−sinθsinθcosθ)
齐次坐标里
(
x
′
y
′
1
)
=
(
G
0
0
T
1
)
(
x
y
1
)
=
(
cos
θ
−
sin
θ
0
sin
θ
cos
θ
0
0
0
1
)
(
x
y
1
)
\begin{pmatrix} x^{\prime}\\ y^{\prime}\\ 1\\ \end{pmatrix}=\begin{pmatrix} \mathbf{G} &\mathbf{0}\\ \mathbf{0}^T&1\\ \end{pmatrix}\begin{pmatrix} x\\ y\\ 1\\ \end{pmatrix} = \begin{pmatrix} \cos \theta & -\sin\theta & 0\\ \sin\theta & \cos\theta & 0\\ 0 & 0 & 1\\ \end{pmatrix}\begin{pmatrix} x\\ y\\ 1\\ \end{pmatrix}
x′y′1
=(G0T01)
xy1
=
cosθsinθ0−sinθcosθ0001
xy1
绕任意点逆时针旋转
先平移到原点,旋转,再平移回去
假设绕
(
c
x
,
c
y
)
\left(c_x,c_y\right)
(cx,cy)
(
x
′
y
′
1
)
=
T
(
c
x
,
c
y
)
(
G
0
0
T
1
)
T
(
−
c
x
,
−
c
y
)
(
x
y
1
)
=
(
cos
θ
−
sin
θ
(
1
−
cos
θ
)
c
x
+
c
y
sin
θ
sin
θ
cos
θ
(
1
−
cos
θ
)
c
y
−
c
x
sin
θ
0
0
1
)
(
x
y
1
)
\begin{aligned} \begin{pmatrix} x^{\prime}\\ y^{\prime}\\ 1\\ \end{pmatrix} &= \mathbf{T}\left(c_x,c_y\right)\begin{pmatrix} \mathbf{G} &\mathbf{0}\\ \mathbf{0}^T&1\\ \end{pmatrix}\mathbf{T}\left(-c_x,-c_y\right)\begin{pmatrix} x\\ y\\ 1\\ \end{pmatrix}\\ &= \begin{pmatrix} \cos \theta & -\sin\theta & \left(1-\cos\theta\right)c_x + c_y \sin \theta\\ \sin\theta & \cos\theta & \left(1-\cos\theta\right)c_y - c_x\sin\theta\\ 0 & 0 & 1\\ \end{pmatrix}\begin{pmatrix} x\\ y\\ 1\\ \end{pmatrix} \end{aligned}
x′y′1
=T(cx,cy)(G0T01)T(−cx,−cy)
xy1
=
cosθsinθ0−sinθcosθ0(1−cosθ)cx+cysinθ(1−cosθ)cy−cxsinθ1
xy1
顺时针旋转,也就是求逆(相当于逆时针旋转
−
θ
-\theta
−θ)
(
T
(
c
x
,
c
y
)
(
G
0
0
T
1
)
T
(
−
c
x
,
−
c
y
)
)
−
1
=
T
(
c
x
,
c
y
)
(
G
T
0
0
T
1
)
T
(
−
c
x
,
−
c
y
)
=
(
cos
θ
sin
θ
(
1
−
cos
θ
)
c
x
−
c
y
sin
θ
−
sin
θ
cos
θ
(
1
−
cos
θ
)
c
y
+
c
x
sin
θ
0
0
1
)
\begin{aligned} \left(\mathbf{T}\left(c_x,c_y\right)\begin{pmatrix} \mathbf{G} &\mathbf{0}\\ \mathbf{0}^T&1\\ \end{pmatrix}\mathbf{T}\left(-c_x,-c_y\right)\right)^{-1} &= \mathbf{T}\left(c_x,c_y\right)\begin{pmatrix} \mathbf{G}^T &\mathbf{0}\\ \mathbf{0}^T&1\\ \end{pmatrix}\mathbf{T}\left(-c_x,-c_y\right)\\ &=\begin{pmatrix} \cos \theta & \sin\theta & \left(1-\cos\theta\right)c_x - c_y \sin \theta\\ -\sin\theta & \cos\theta & \left(1-\cos\theta\right)c_y + c_x\sin\theta\\ 0 & 0 & 1\\ \end{pmatrix} \end{aligned}
(T(cx,cy)(G0T01)T(−cx,−cy))−1=T(cx,cy)(GT0T01)T(−cx,−cy)=
cosθ−sinθ0sinθcosθ0(1−cosθ)cx−cysinθ(1−cosθ)cy+cxsinθ1
缩放
x
′
=
S
x
x
y
′
=
S
y
y
z
′
=
S
z
z
\begin{aligned} x^{\prime} &= S_xx\\ y^{\prime} &= S_yy\\ z^{\prime} &= S_zz\\ \end{aligned}
x′y′z′=Sxx=Syy=Szz
于是可以写出
(
x
′
y
′
z
′
1
)
=
S
(
S
x
,
S
y
,
S
z
)
(
x
y
z
1
)
=
(
S
x
0
0
0
0
S
y
0
0
0
0
S
z
0
0
0
0
1
)
(
x
y
z
1
)
\begin{pmatrix} x^{\prime}\\ y^{\prime}\\ z^{\prime}\\ 1\\ \end{pmatrix} = \mathbf{S}\left(Sx,Sy,Sz\right) \begin{pmatrix} x\\ y\\ z\\ 1\\ \end{pmatrix}=\begin{pmatrix} Sx&0&0&0\\ 0&Sy&0&0\\ 0&0&Sz&0\\ 0&0&0&1 \end{pmatrix}\begin{pmatrix} x\\ y\\ z\\ 1\\ \end{pmatrix}
x′y′z′1
=S(Sx,Sy,Sz)
xyz1
=
Sx0000Sy0000Sz00001
xyz1
求逆
(
S
(
S
x
,
S
y
,
S
z
)
)
−
1
=
(
1
S
x
0
0
0
0
1
S
y
0
0
0
0
1
S
z
0
0
0
0
1
)
=
S
(
1
S
x
,
1
S
y
,
1
S
z
)
\left(\mathbf{S}\left(Sx,Sy,Sz\right)\right)^{-1} =\begin{pmatrix} \frac{1}{Sx}&0&0&0\\ 0&\frac{1}{Sy}&0&0\\ 0&0&\frac{1}{Sz}&0\\ 0&0&0&1 \end{pmatrix} =\mathbf{S}\left(\frac{1}{Sx},\frac{1}{Sy},\frac{1}{Sz}\right)
(S(Sx,Sy,Sz))−1=
Sx10000Sy10000Sz100001
=S(Sx1,Sy1,Sz1)
#!/usr/bin/env python
# _*_ coding:utf-8 _*_
import numpy as np
from cv2 import cv2
path = '000001163.jpg'
if __name__ == '__main__':
img = cv2.imread(path)
h, w = img.shape[:2]
print(img.shape)
angle = 30
matrix = cv2.getRotationMatrix2D((w // 2, h // 2), angle, 1)
rad = np.deg2rad(angle)
cosine = np.cos(rad)
sine = np.sin(rad)
new_h = int(np.round(np.abs(h * cosine) + np.abs(w * sine)))
new_w = int(np.round(np.abs(w * cosine) + np.abs(h * sine)))
print(matrix)
dst = cv2.warpAffine(img, matrix, (new_w, new_h))
print(dst.shape)
cv2.imshow("src", img)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
















 7344
7344











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











