







多旋翼无人机系统概述
四轴(多轴)飞行器也叫四旋翼(多旋翼)飞行器,它有四个(多个)螺旋桨,四轴(多轴)飞行器也是飞行器中结构最简单的飞行器了。前后左右各一个,其中位于中心的主控板接收来自于遥控发射机的控制信号,在收到操作者的控制后通过数字的控制总线去控制四个电调,电调再把控制命令转化为电机的转速,以达到操作者的控制要求。根据所安装的飞控系统来确定电机的转动顺序和螺旋桨的正反,机械结构上只需保持重量分布的均匀,四电机保持在一个水平线上,可以说结构非常简单,做四轴的目的也是为了用电子控制把机械结构变得尽可能的简单。
多旋翼无人机组成归纳
如下:
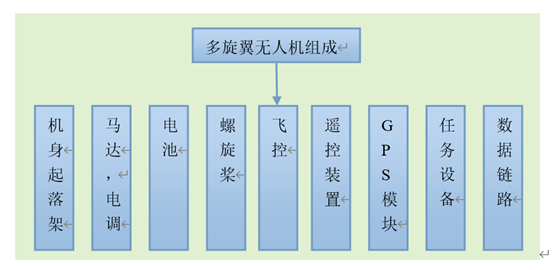
本篇为上篇,只讲到螺旋桨部分。
多旋翼无人机系统分类
按轴数分有三轴、四轴、六轴、八轴甚至十八轴等。
按发动机个数分有三旋翼、四旋翼、六旋翼、八旋翼甚至十八旋翼等。
要大家明确一点是轴和旋翼一边情况下是相同的,有时候也是不同的,比如四轴八旋翼。是将四轴上每个轴上下各安装一个电机构成八旋翼。本文主要以四旋翼和六旋翼为主。
1.机身
机身是大多数设备的安装位置,也是多旋翼无人机的主体,也成为机架。根据机臂个数不同分为:三旋翼,四旋翼,六旋翼,八旋翼,十六旋翼,十八旋翼也有四轴八旋翼等,结构不同叫法也不同。出于结构强度和重量考虑,一般采用碳纤维或塑料材质。常见机架型号有F450,F550,穿越机常见机架型号为QAV250。F450指的是轴中心对轴中心的距离是450MM。 F450非常适合新手,它的价格低,维护成本低。


2. 起落架
多旋翼无人机唯一和地面接触的部位。作为整个机身在起飞和降落时候的缓冲,也是为了保护机载设备,要求强度高,结构牢固,和机身保持相当可靠的连接,能够承受一定的冲力。一般在起落架前后安装或者涂装上不同的颜色,用来在远距离多旋翼无人机飞行时能够区分多旋翼无人机的前后。
3.马达(电机)
马达:对于电动无人机来说就是电机,是多旋翼无人机的动力机构,提供升力,推力等。电机分为有刷电机和无刷电机,无人机当前常用无刷电机,无刷电机去除了电刷,最直接的变化就是没有了有刷电机运转时产生的电火花,这样就极大减少了电火花对遥控无线电设备的干扰。无刷电机没有了电刷,运转时摩擦力大大减小,运行顺畅,噪音会低许多,这个优点对于模型运行稳定性是一个巨大的支持。部分超小型无人机会使用空心杯电机。
电机四个数字的含义:
X2212电机、X2018电机等等,这表示电机的尺寸(单位mm)。不管什么牌子的电机,具体都要对应4位这类数字,其中前2位是电机转子的直径,后面2位是电机转子的高度。注意,不是外壳。简单来说,前面2位越大,电机越肥,后面2位越大,电机越高。又高又大的电机,功率就更大,适合做大四轴。通常X2212电机是最常见的配置了。
电机的转向
当需要使用自锁桨的时候,电机需要使用标注出方向的电机,分为CW和CCW。
【CCW】counter-clockwise的缩写,表示逆时针旋转。
【CW】clockwise 的缩写,表示顺时针旋转。
不使用自锁桨时,对于电机的转向一般没有要求。
无刷电机KV值定义
转速/V,意思为输入电压增加1V,无刷电机空转转速增加的转速值。例如:1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压,电机空转就2000转了。单从KV值,不可以评价电机的好坏,因为不同KV值有不同的适用不同尺寸的浆绕线匝数多的,KV值低,最高输出电流小,但扭力大,上大尺寸的浆;绕线匝数少的,KV值高,最高输出电流大,但扭力小,上小尺寸的浆。部分电机在购买时店家会给焊接好香蕉头,部分需要自己焊接。
常用电机品牌:朗宇、TMOTOR
4.电调(电子调速器ESC ElectronicSpeed Controler)
电子调速器,将飞控的控制信号(pwm),转变为电流信号,用于控制电机转速。因为电机的电流是很大的,通常每个电机正常工作时,平均有3A左右的电流,如果没有电调的存在,飞控根本无法承受这样大的电流,而且飞控也没有驱动无刷电机的功能。部分电调在购买时店家会给焊接好香蕉头,部分需要自己焊接。电调上标识电流为允许通过最大电流(常见30A,40A)。
常用电调品牌:好盈(乐天系列,天行者系列),银燕。

5.电池
是电动多旋翼无人机的供电装置,给电机和机载电子设备供电。最小是1S电池,常用的是3S、4S、6S,S表示锂电池串联的节数。1S代表3.7V电压,无人机越大,一般需要的电压越高,如F450的无人机一般用3S或者4S锂电池,F680的会使用6S锂电池,每一节锂电池的满电电压为4.2V,空电电压为3.7V,所以电池到达最大电压(节数4.2V)时即为充电完成,到达最低电压时(节数3.7V)就不应该再使用。
电池接口种类:
常见接口为XT60,XT90,T插(不安全)



电池容量(mah):
mha是电池容量的单位,中文名称叫做“毫安时”。举例说明:如果一个电池的容量是1000毫安时,意思就是,如果用1000毫安的电流放电,可使用1小时;如果用500毫安的电流放电,可以使用2小时;而用100毫安的电流放电,可以使用10小时。以此类推。mha的数字越大,在无人机上使用的时间越长。
放电倍率(单位C):
锂电池放电C数即电池放电C率,用来表示充放电电流的大小。C表示锂电池放电倍率的符号,比如1C表示锂电池可以做到按1倍放电速率来稳定放电的能力,以此类推其他比如2C、10C、40C等,就代表锂电池可以稳定放电的最大电流放电倍数。锂电池充放电倍率等于充放电电流除以电池的额定容量。
举例说明:

如图所示,此电池最大放电电流即为5300mA=5.3A*30C=159A
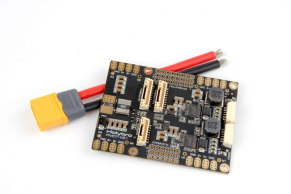
电流计:
电流计并不是显示电流大小的传感器,是给飞控供电的模块,接入高压的锂电池,然后输出稳定的电压驱动飞控,Pixhawk4的电流计(如图)更是集成了更多功能,可以成为给电调供电的枢纽(相当于分线板),飞控的转接板(把飞控多个引脚引出,有助于飞控减小体积),部分飞控在购买时店家会赠送电流计。

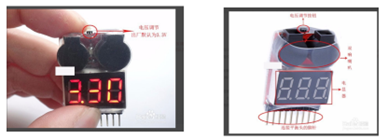
BB响:
该电压显示器用于1S~8S的锂电池检测,自动检测锂电池每个电芯的电压和总电压.支持反向连接保护.
它可以让你随时随地的了解你的电池的工作状态,使你的电池不会因为过放或过充造成的伤害.
当电压低于设定值时,蜂鸣器会响起,红色LED灯会闪烁;出厂默认设定值为3.3V,按下按键可改变电压设定值,自动保存用户当前设定值。

6.螺旋桨
安装在电机上,多旋翼无人机安装的都是不可变总距的螺旋桨,主要指标有螺距和尺寸。浆的指标是4位数字,前面2位代表桨的直径(单位:英寸,1英寸=254毫米)后面2位是桨的螺距。所有大桨叶响应慢,不容易改变运动状态(即转速),同时桨叶分正反转向,因为单个螺旋桨由电机带动旋转时会产生一个力使得无人机沿中轴线水平旋转,所以需要设置不同螺旋桨为不同转向来抵消,否则多旋翼无人机会在起飞之后持续旋转,不过基于这个原理,可以用转速控制无人机的偏航运动,一般来说,小桨高转速有益于增稳,飞机可以飞行的更稳,但是续航表现会更差。
正反桨 :
四轴飞行为了抵消螺旋桨的自旋,相邻的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。适合顺时针旋转的叫正浆(CW)、适合逆时针旋转的是反浆(CCW)。安装的时候,一定记得无论正反桨,有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致,即高的一面(迎风面))。
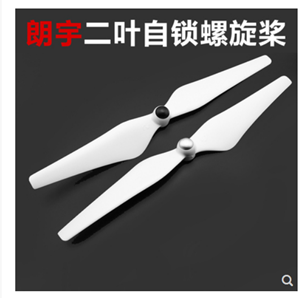
自锁桨:
旋转时会自动越转越紧,dji(大疆)的精灵系列通常使用的即为自锁桨。自锁桨在安装时需要主要使用专用的自锁桨电机并且安装方向与电机相同(即桨叶中心色块与电机顶色块颜色相同)。桨叶上同时也会标注出安装方向。普通桨叶安装时为用螺母上紧。
电机与螺旋桨的搭配:
建议采用大家常见的配置,但原理这里可以阐述一下:螺旋桨越大,升力就越大,但对应需要更大的力量来驱动;螺旋桨转速越高,升力越大;电机的kv越小,转动力量就越大。
综上所述,大螺旋桨就需要用低kv电机,小螺旋桨就需要高kv电机(因为需要用转速来弥补升力不足)。如果高kv带大桨,力量不够,那么就很困难,实际还是低俗运转,电机和电调很容易烧掉。如果低kv带小桨,完全没有问题,但升力不够,可能造成无法起飞。例如:常用1000kv电机,配10寸左右的桨。
两叶桨与三叶桨:
两叶桨的效率高于三叶桨,因为它们的空气切割面小,阻力小。三叶桨的拉力大于两叶桨,因为它们的桨面积大,能产生更多的升力。两叶桨适合低转速、高扭矩的电机,三叶桨适合高转速、低扭矩的电机。两叶桨比较稳定,噪音小,三叶桨比较灵敏,噪音大。因此,两叶桨常用于载荷无人机,三叶桨常用于穿越机。
参考文献:
1、无人机系统导论(第二版)
2、中国民航局官方网站
3、5iMX论坛
4、翎航智能科技工作室培训教材
5、听风南巷博客:http://t.csdn.cn/VNIHf

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









