







1 滤波
- 滤波的作用就是给不同的信号分量不同的权重
- 比如低通滤波,就是直接给低频信号权重1;高频信号权重0
- 降噪可以看成一种滤波:降噪就是给信号一个高的权重而给噪声一个低的权重
1.1 滤波、插值与预测
| 插值(interpolation) 平滑 (smoothing) | 用 过去 的数据来拟合 过去 的数据 |
| 滤波 (filtering) | 用 当前 和 过去 的数据来求取 当前 的数据 |
| 预测 (prediction) | 用 当前 和 过去 的数据来求取 未来 的数据 |
2 卡尔曼滤波
- 卡尔曼滤波器 由一系列递归数学公式描述。它们提供了一种高效可计算的方法来估计过程的状态,并使估计均方误差最小。
- 卡尔曼滤波器应用广泛且功能强大:它可以估计信号的过去和当前状态,甚至能估计将来的状态,即使并不知道模型的确切性
- Kalman Filter 只能减小均值为0的测量噪声带来的影响。只要噪声期望为0,那么不管方差多大,只要迭代次数足够多,那效果都很好。反之,噪声期望不为0,那么估计值就还是与实际值有偏差。
2.1 图示卡尔曼滤波的作用
- 我们考虑一辆小车在一条直线上行驶。
- 如果我们知道小车的运动方向、所受的力、质量等等参数,以及小车的初始状态,理论上我们可以求出它任意时刻的状态
- 但是小车内部(小车结构、车轮质地等)以及小车外部(环境因素)等可能存在不确定因素(噪声),这会导致小车不一定正正好好在预测的位置,会存在一定的噪声
- ——>我们假设每种不确定因素(噪声)都满足正态分布,那么我们可以据此对小车的位置进行估计:
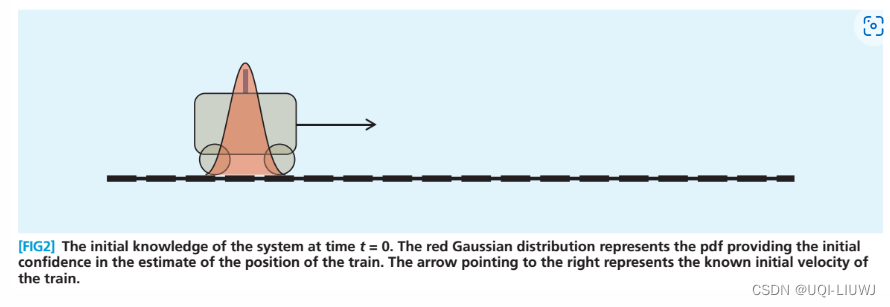
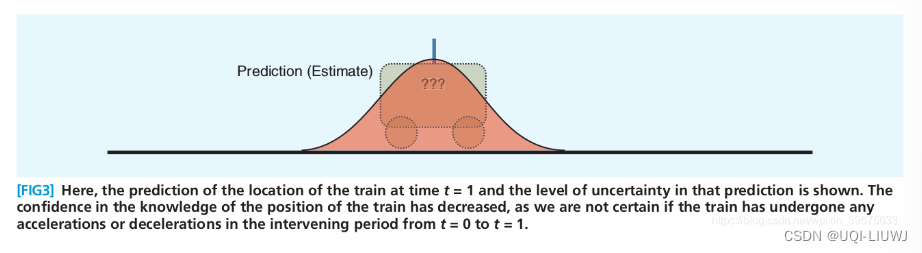
根据小车的运动方程、小车的属性,我们可以估计处小车在下一时刻的位置
小车运动过程中,会不断地收到噪声的影响,因而t=1时刻方差(不确定性)比t=0时刻还要大。
为了避免纯理论估计估计带来的偏差,在 t=1 时刻对小车的位置坐标进行一次测量,当然对小车距离的测量也会受到种种不确定因素的影响,所以小车t=1 时的测量位置服从蓝色的正态分布:
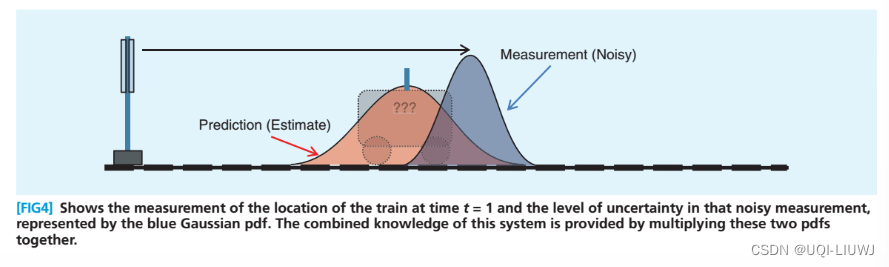
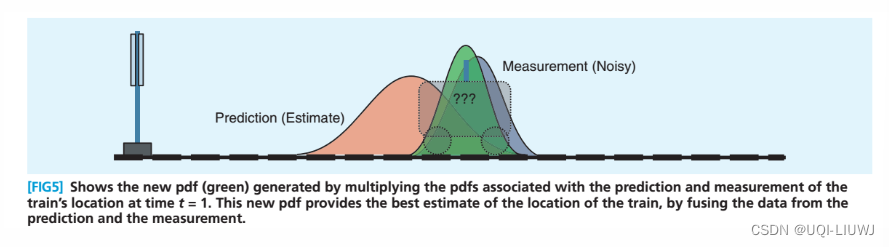
于是我们得到了两个不同的分布,都是来描述小车的位置的。那么应该怎么结合这两个分布呢?
卡尔曼滤波的作用是找一个权重,将二者加权平均,合并为绿色的正态分布。那个就是卡尔曼滤波的结果
2.2 离散卡尔曼滤波
2.2.1 过程状态
注:这一小节的上下标和之后卡尔曼滤波的部分会有一定的差异
离散卡尔曼滤波器用于估计离散时间过程的状态变量 (小车的方向,速度等)
这个离散时间过程由以下离散随机差分方程描述:
| 估计的当前状态 | |
| 上一时刻的状态 | |
| 输入值 | |
| 噪声(满足正态分布) |
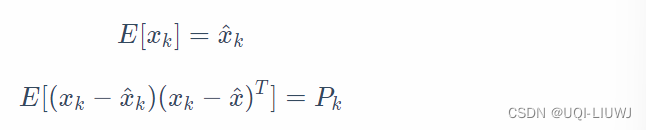
定义观测变量 (小车的位置),我们有:
| 当前时刻的观测变量 | |
| 当前状态变量 | |
| 噪声(和W独立,且也满足正态分布) |
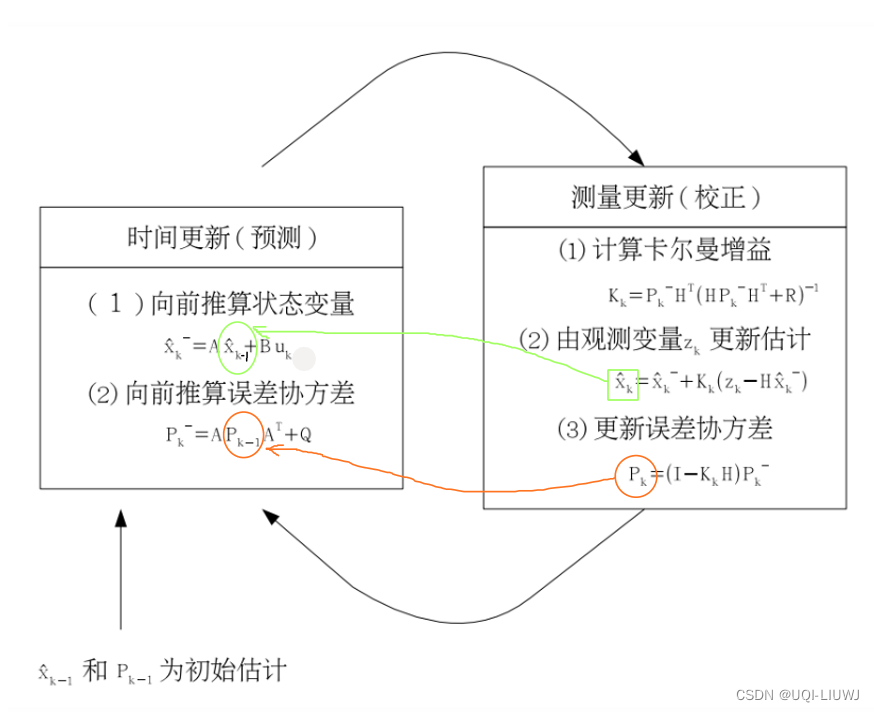
2.2.2 时间更新方程
- 时间更新方程根据上一时刻(k-1 时刻) 的后验估计值,推算当前状态变量和误差协方差估计的值
- 先验估计
- 用来得到小车例子中的红色部分
更新方程如下:
( − 代表先验,
^ 代表估计)
已知第 k 步以前状态情况下,第 k 步的先验状态估计 知道测量变量
之后,第k-1步的后验状态估计
(第k-1步 卡尔曼滤波的结果)
F(后面的A)
- 将上一时刻k−1 的状态变量 线性映射到当前时刻 k 的状态转换矩阵
- 实际中 F应随时间变化,这里假设为常数。
B 控制输入矩阵,假设为常数 输入值 先验协方差 ——>通过时间更新方程,我们得到k时刻 状态变量的先验估计(均值)
和先验协方差估计
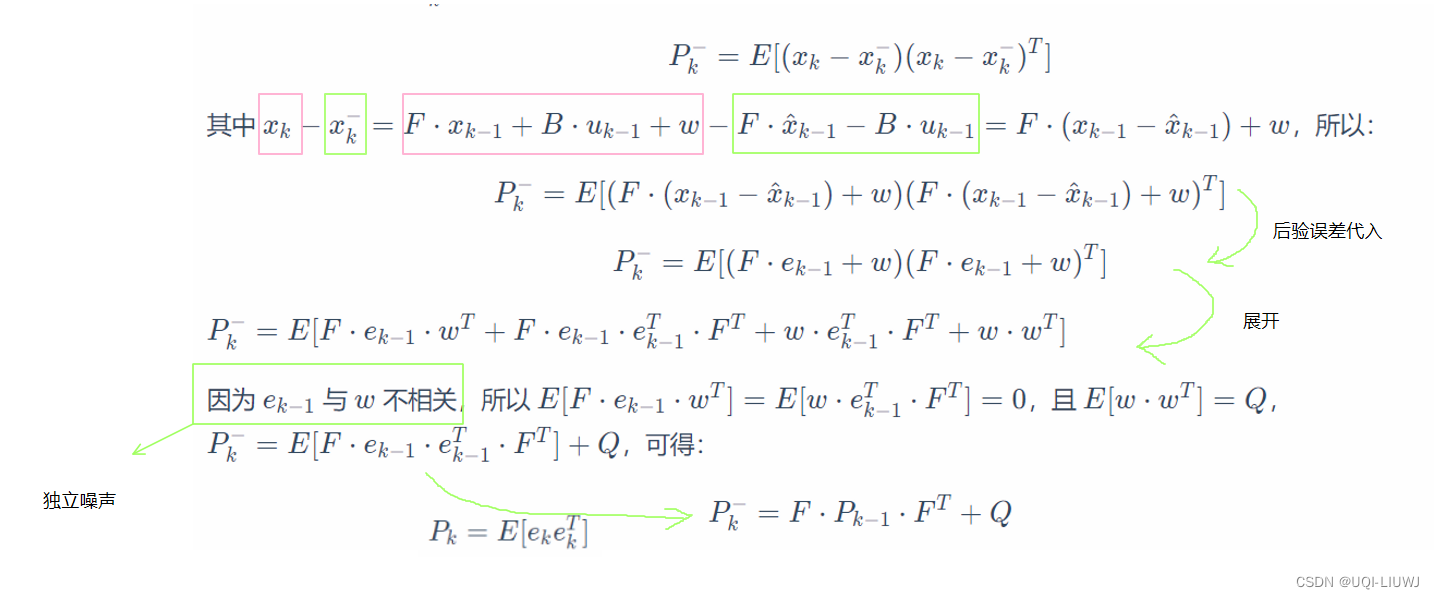
2.2.2.1 先验协方差估计 的推导
的推导
记先验和后验估计的误差为
于是先验和后验估计的协方差矩阵为
我们接下来推导
2.2.3 测量(状态)更新方程
使用当前时刻的测量值来更正预测阶段估计值,得到当前时刻的后验估计值。
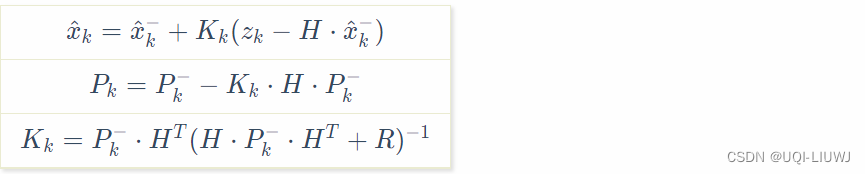
测量状态方程的顺序是:
- 计算卡尔曼增益 Kk (第三行)
- 作用是使后验估计误差协方差 Pk 最小
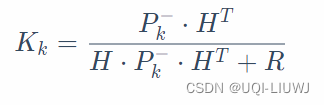
- 观测误差的协方差矩阵R越大(观测的准确性越不能得到保障),
越小(变相地先验预测的权重越大)
- 如果观测误差的协方差矩阵R趋近于0——>
- 如果观测误差的协方差矩阵R趋近于0——>
- 先验协方差估计
-
如果 先验协方差估计
-
- 观测误差的协方差矩阵R越大(观测的准确性越不能得到保障),
- 测量输出以获得 Zk
- 产生k时刻状态的后验估计
(第一行)
- 先验估计
的差【测量过程的观测值和预估值之间的差异】,这两项的线性组合
- 先验估计
- 估计状态的后验协方差Pk (第二行)
——>

2.3 卡尔曼滤波的迭代
上一时刻计算得到的后验估计被作为下一时刻计算的先验估计
3 python实现
3.0 参数设置
令:
| 真实值x | -0.377 |
| A(观测状态——>状态变量) | 1 |
| H(状态变量——>测量值) | 1 |
| R(测量噪声协方差) | 0.01 |
| Q(过程激励噪声协方差(系统过程的协方差)) | 1e-5 |
3.1 手动实现
3.1.1 导入库
import numpy
import pylab
#导入库
n_iter = 50
sz = (n_iter,)
x = -0.37727 # 真实值
z = numpy.random.normal(x,0.1,size=sz)
# 50个观测值 ,观测时存在噪声
#n_iter个样本点 3.1.2 参数设置
xhat=numpy.zeros(sz)
# x 滤波估计值 (后验)
P=numpy.zeros(sz)
# 滤波估计协方差矩阵 (后验)
xhatminus=numpy.zeros(sz)
# x 估计值 (先验)
Pminus=numpy.zeros(sz)
# 估计协方差矩阵 (先验)
K=numpy.zeros(sz)
# 卡尔曼增益 Q = 1e-5
# 过程激励噪声协方差
xhat[0] = 0.0
P[0] = 1.0
R=0.013.1.3 卡尔曼滤波
for k in range(1,n_iter):
# 预测
xhatminus[k] = xhat[k-1]
#^X_k_=A^X_{k-1}+BU(k-1)
#A=1, 这里没有输入,所以U= 0
Pminus[k] = P[k-1]+Q
#Pk_=AP_{k-1}A^T+Q
# 更新
K[k] = Pminus[k]/( Pminus[k]+R )
#K(k)=Pk_H'/[HPk_H' + R]
#H=1
xhat[k] = xhatminus[k]+K[k]*(z[k]-xhatminus[k])
#X_k = X_k_ + K(k)[Z(k) - HX_k_], H=1
P[k] = (1-K[k])*Pminus[k]
#Pk = (1 - K(k)H)Pk_, H=1
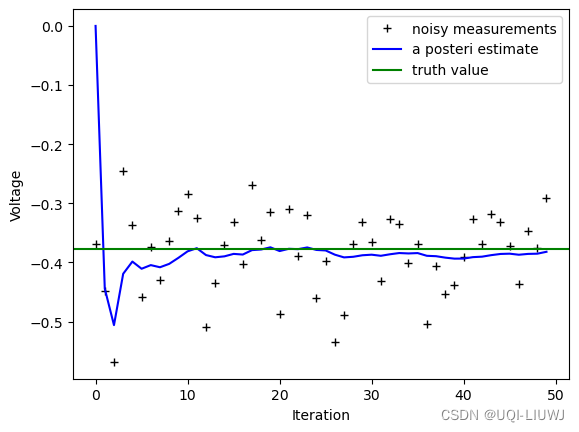
3.1.4 绘制结果
pylab.figure()
pylab.plot(z,'k+',label='noisy measurements')
#观测值
pylab.plot(xhat,'b-',label='a posteri estimate')
#滤波估计值
pylab.axhline(x,color='g',label='truth value')
#真实值
pylab.legend()
pylab.xlabel('Iteration')
pylab.ylabel('Voltage')
3.2 使用filterpy包
3.2.1 导入库
from filterpy.kalman import KalmanFilter
import numpy as np
n_iter = 50
sz = (n_iter,)
x = -0.37727 # 真实值
z = numpy.random.normal(x,0.1,size=sz)
# 50个观测值 ,观测时存在噪声
#n_iter个样本点 3.2.2 参数设置
kf = KalmanFilter(dim_x=1, dim_z=1)
kf.F = np.array([1])
kf.H = np.array([1])
kf.R = np.array([0.1**2])
kf.P = np.array([1.0])
kf.Q = 1e-5
xhat[0] = 0.0
P[0] = 1.0 3.2.3 训练
for k in range(1,n_iter):
kf.predict()
xhat[k] = kf.x
kf.update(z[k], 0.1**2, np.array([1]))3.2.4 画图
pylab.figure()
pylab.plot(z,'k+',label='noisy measurements')
#观测值
pylab.plot(xhat,'b-',label='a posteri estimate')
#滤波估计值
pylab.axhline(x,color='g',label='truth value')
#真实值
pylab.legend()
pylab.xlabel('Iteration')
pylab.ylabel('Voltage')


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











