








 超级会员免费看
超级会员免费看

 在实车调试PID控制器时,积分项可能导致扭矩过大引发超调。积分饱和是指当积分项达到最大或最小限幅时,积分作用暂停。为解决此问题,需要积分清零策略。本文探讨积分饱和的定义和清除策略。
在实车调试PID控制器时,积分项可能导致扭矩过大引发超调。积分饱和是指当积分项达到最大或最小限幅时,积分作用暂停。为解决此问题,需要积分清零策略。本文探讨积分饱和的定义和清除策略。
1. Question background?
笔者在实车调试PID控制参数时,注意到扭矩环PID的积分项一旦加入,计算出的扭矩其数值会很大,这会导致控制系统严重超调。
为了弄清积分饱和和积分清零策略,笔者上网搜相关资料,结合自身的实车经验写下此文。
2. Definition of integral saturation?
位置式PID在积分项达到饱和时,误差仍然会在积分作用下继续累积,如果一旦误差开始反向变化,系统就会需要一定时间从饱和区退出,所以在积分项的输出达到最大和最小时,要停止积分作用,并且要有积分限幅和输出限幅。
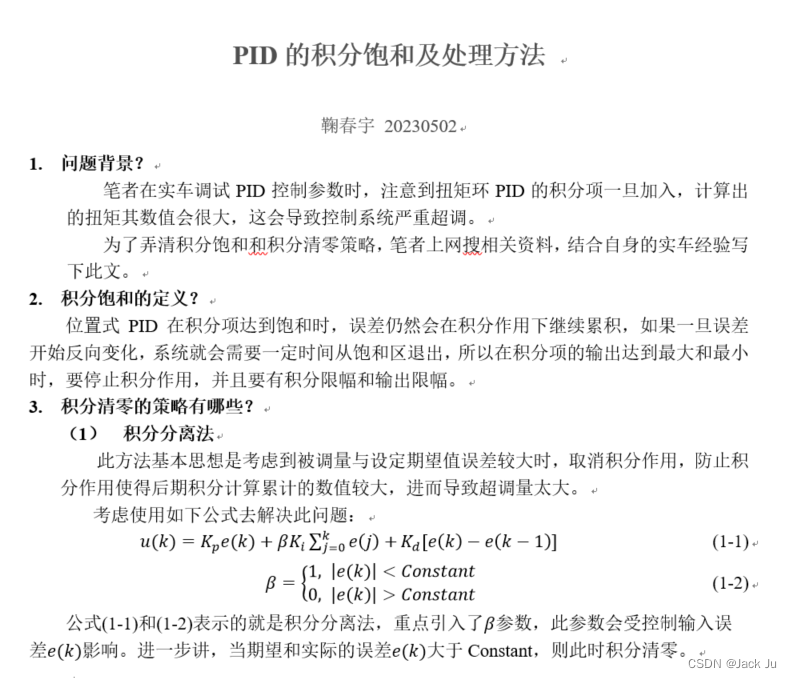
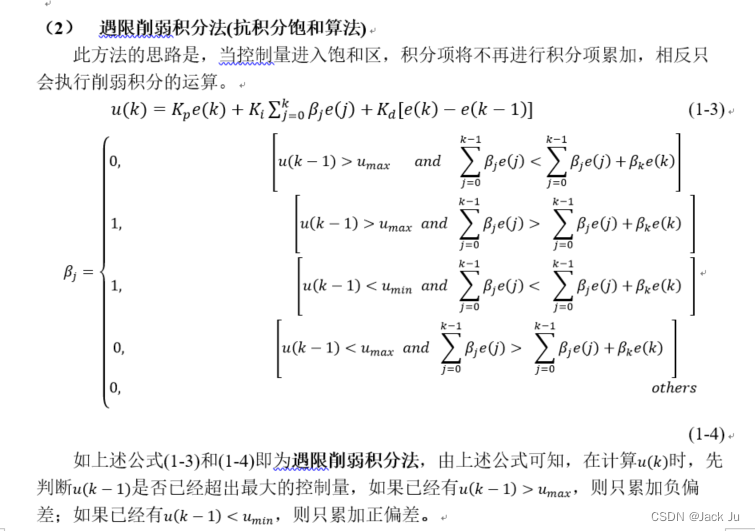
3. What are the strategies for point clearing?

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











