







ROS基础
1. rosturtle
roscore
rosrun turtlesim
rosrun turtlesim turtle_teleop_key
rqt_graph
rosnode
Type rosnode <command> -h for more detailed usage, e.g. rosnode ping -h
~$ rosnode list
/rosout
/teleop_turtle
/turtlesim
~$ rosnode info /turtlesim
Node [/turtlesim]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/color_sensor [turtlesim/Color]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [geometry_msgs/Twist]
Services:
* /clear
* /kill
* /reset
* /spawn
* /turtle1/set_pen
* /turtle1/teleport_absolute
* /turtle1/teleport_relative
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
contacting node http://zrf-CP65S:39049/ ...
Pid: 13308
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (43011 - 127.0.0.1:48200) [28]
* transport: TCPROS
* topic: /turtle1/cmd_vel
* to: /teleop_turtle (http://zrf-CP65S:34147/)
* direction: inbound (40174 - zrf-CP65S:43093) [30]
* transport: TCPROS
~$ rostopic
rostopic is a command-line tool for printing information about ROS Topics.
Commands:
rostopic bw display bandwidth used by topic
rostopic delay display delay of topic from timestamp in header
rostopic echo print messages to screen
rostopic find find topics by type
rostopic hz display publishing rate of topic
rostopic info print information about active topic
rostopic list list active topics
rostopic pub publish data to topic
rostopic type print topic or field type
Type rostopic <command> -h for more detailed usage, e.g. 'rostopic echo -h'
~$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
~$ rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
~$ rosmsg show geometry_msgs/Twist
geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
~$ rosservice list
/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/spawn
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level
~$ rosservice call /spawn "x: 2.0
y: 2.0
theta: 0.0
name: 'turtle2'"
rosbag play cmd cmd_record.bag
rosbag play cmd_record.bag
2. 工作空间
代码空间(src)、编译空间(build)、开发空间(devel)、安装空间(install)
创建工作空间
~$ mkdir catkin_ws
~$ cd catkin_ws/
~/catkin_ws$ mkdir src
~/catkin_ws$ cd src/
~/catkin_ws/src$ catkin_init_workspace
~/catkin_ws/src$ cd ..
~/catkin_ws$ pwd
~/catkin_ws$ catkin_make
~/catkin_ws$ catkin_make install
创建功能包
~$ cd catkin_ws/src/
~$ ~/catkin_ws/src$ catkin_creat_pkg test_pkg roscpp rospy std_msgs
编译功能包
~/catkin_ws/src$ cd ..
~/catkin_ws$ catkin_make
设置环境变量:
~/catkin_ws$ source devel/setup.bash
~/catkin_ws$ echo $ROS_PACKAGE_PATH
3. 创建功能包
~/catkin_ws/src$ catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
如何创建一个发布者:
- 初始化ROS节点
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 创建消息数据
- 按照一定频率循环发布消息
learning_topic\src\velocity_publisher.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "velocity_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publsh turtle velocity command[%0.2f m/s, %0.2f rad/s]",
vel_msg.linear.x, vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
cmakelist.txt中bulid下加两行:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
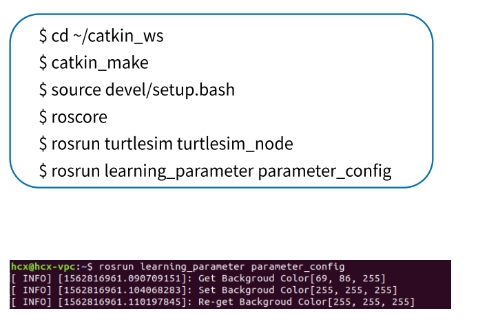
运行:
cd catkin_ws
catkin_make
source devel/setup.bash
roscore
rosrun turtlesim turtlesim_node
rosrun learning_topic velocity_publisher
4. 如何创建一个订阅者
- 初始化ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成消息处理
learning_topic\src\pose_subscriber.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include <ros/ros.h>
#include "turtlesim/Pose.h"
// 接收到订阅的消息后,会进入消息回调函数
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f, y:%0.6f", msg->x, msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose", 10, poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
cmakelist.txt中bulid下加两行:
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
~/catkin_ws$ catkin_make
~$ rosrun turtlesim turtlesim_node
~$ rosrun learning_topic pose_subscriber
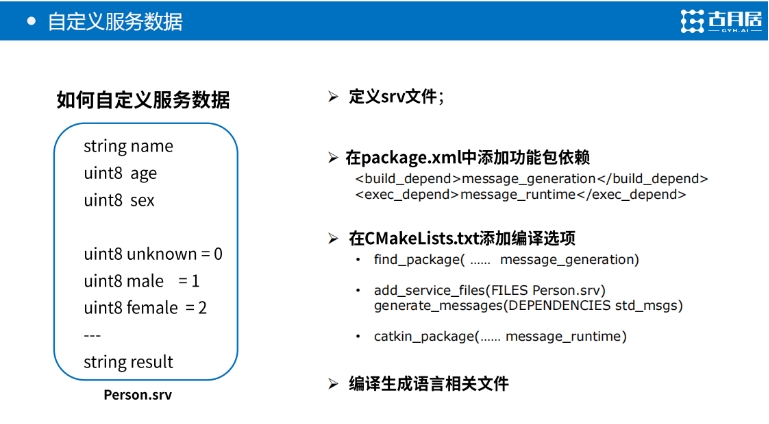
5. 自定义话题消息:
创建msg文件learning_topic\msg\Person.msg:
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
在package.xml中添加功能包依赖:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
在CMakeList.txt添加编译选项:
• find_package( …… message_generation)
• add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
• catkin_package的CATKIN_DEPENDS中添加(…… message_runtime)
编译生成语言相关文件
src下创建person_publisher.cpp,person_subscriber.cpp
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning_topic/Person.h"
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度10
ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info", 10);
// 设置循环的频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok())
{
// 初始化learning_topic::Person类型的消息
learning_topic::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = learning_topic::Person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include <ros/ros.h>
#include "learning_topic/Person.h"
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d",
msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}
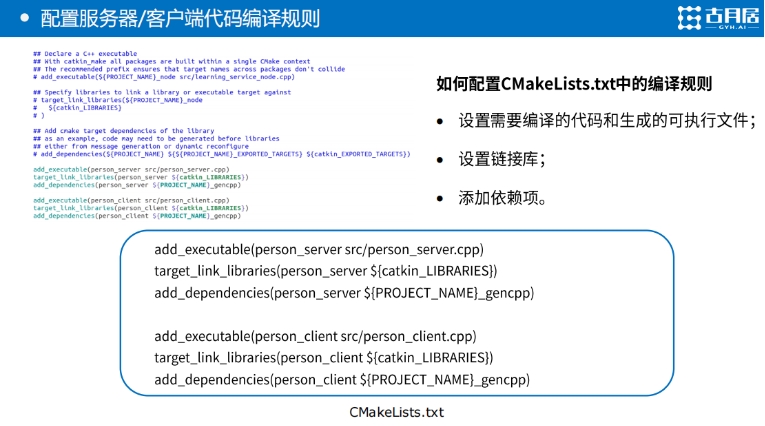
在CMakeList.txt添加编译选项:
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)
catkin_make
roscore
~/catkin_ws$ rosrun learning_topic person_publisher
~/catkin_ws$ rosrun learning_topic person_subscriber
6. 如何实现一个客户端
- 初始化ROS节点
- 创建一个Client实例
- 发布服务请求数据
- 等待Server处理之后的应答结果
learning_service/src/turtle_spawn/cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
cmakelist.txt中bulid下加两行:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})

7. 服务端Server实现

learning_service/src/turtle_command_server.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Trigger.h>
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
// service回调函数,输入参数req,输出参数res
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
// 显示请求数据
ROS_INFO("Publish turtle velocity command [%s]", pubCommand==true?"Yes":"No");
// 设置反馈数据
res.success = true;
res.message = "Change turtle command state!"
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "turtle_command_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/turtle_command的server,注册回调函数commandCallback
ros::ServiceServer command_service = n.advertiseService("/turtle_command", commandCallback);
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 循环等待回调函数
ROS_INFO("Ready to receive turtle command.");
// 设置循环的频率
ros::Rate loop_rate(10);
while(ros::ok())
{
// 查看一次回调函数队列
ros::spinOnce();
// 如果标志为true,则发布速度指令
if(pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}

8. 服务数据的定义与使用
learning_service/src/person_server.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将执行/show_person服务,服务数据类型learning_service::Person
*/
#include <ros/ros.h>
#include "learning_service/Person.h"
// service回调函数,输入参数req,输出参数res
bool personCallback(learning_service::Person::Request &req,
learning_service::Person::Response &res)
{
// 显示请求数据
ROS_INFO("Person: name:%s age:%d sex:%d", req.name.c_str(), req.age, req.sex);
// 设置反馈数据
res.result = "OK";
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "person_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/show_person的server,注册回调函数personCallback
ros::ServiceServer person_service = n.advertiseService("/show_person", personCallback);
// 循环等待回调函数
ROS_INFO("Ready to show person informtion.");
ros::spin();
return 0;
}
learning_service/src/person_client.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/show_person服务,服务数据类型learning_service::Person
*/
#include <ros/ros.h>
#include "learning_service/Person.h"
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_client");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/show_person");
ros::ServiceClient person_client = node.serviceClient<learning_service::Person>("/show_person");
// 初始化learning_service::Person的请求数据
learning_service::Person srv;
srv.request.name = "Tom";
srv.request.age = 20;
srv.request.sex = learning_service::Person::Request::male;
// 请求服务调用
ROS_INFO("Call service to show person[name:%s, age:%d, sex:%d]",
srv.request.name.c_str(), srv.request.age, srv.request.sex);
person_client.call(srv);
// 显示服务调用结果
ROS_INFO("Show person result : %s", srv.response.result.c_str());
return 0;
};



9. 参数的使用与编程方法:
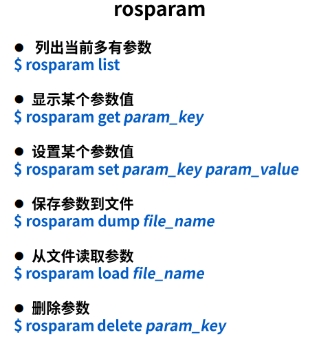
~$ rosparam
rosparam is a command-line tool for getting, setting, and deleting parameters from the ROS Parameter Server.
Commands:
rosparam set set parameter
rosparam get get parameter
rosparam load load parameters from file
rosparam dump dump parameters to file
rosparam delete delete parameter
rosparam list list parameter names
~$ rosparam list
/rosdistro
/roslaunch/uris/host_zrf_cp65s__38665
/rosversion
/run_id
/turtlesim/background_b
/turtlesim/background_g
/turtlesim/background_r
~$ rosparam get /turtlesim/background_b
~$ rosparam set /turtlesim/background_b 100
~$ rosservice call /clear "{}"
~$ rosparam dump param.yaml
~$ rosparam load param.yaml
~$ rosservice call /clear "{}"
~$ rosparam delete /turtlesim/background_g
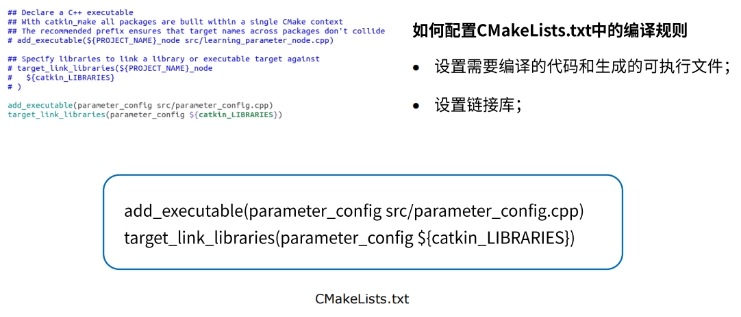
learning_parameter/src/parameter_config.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程设置/读取海龟例程中的参数
*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
int red, green, blue;
// ROS节点初始化
ros::init(argc, argv, "parameter_config");
// 创建节点句柄
ros::NodeHandle node;
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数
ros::param::set("/background_r", 255);
ros::param::set("/background_g", 255);
ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数
ros::param::get("/background_r", red);
ros::param::get("/background_g", green);
ros::param::get("/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色
ros::service::waitForService("/clear");
ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");
std_srvs::Empty srv;
clear_background.call(srv);
sleep(1);
return 0;
}
10. ROS中的坐标系管理系统TF
~$ sudo apt-get install ros-noetic-turtle-tf
python报错:
$ sudo update-alternatives --install /usr/bin/python python /usr/bin/python3 1000
~$ roslaunch turtle_tf turtle_tf_demo.launch
~$ rosrun turtlesim turtle_teleop_key
~$ rosrun tf view_frames
报错:
~$ sudo gedit /opt/ros/noetic/lib/tf/view_frames
增加vstr=str(vstr)
~$ rosrun tf tf_echo turtle1 turtle2
~$ rosrun rviz rviz -d `rospack find turtle_tf` /rviz/turtle __rviz.rviz
11. tf坐标系广播与监听的编程实现
~/catkin_ws/src$ catkin_create_pkg learning_tf roscpp rospy tf turtlesim
learning_tf/src/turtle_tf_broadcaster.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
learning_tf/src/turtle_tf_listener.cpp:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
cmakelist:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
~$ rosrun turtlesim turtlesim_node
~$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
~$ rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
~$ rosrun learning_tf turtle_tf_listener
~$ rosrun turtlesim turtle_teleop_key
12. launch启动文件的使用方法



learning_launch/launch/simple.launch:
<launch>
<node pkg="learning_topic" type="person_subscriber" name="talker" output="screen" />
<node pkg="learning_topic" type="person_publisher" name="listener" output="screen" />
</launch>
learning_launch/launch/turtlesim_parameter_config.launch:
<launch>
<param name="/turtle_number" value="2"/>
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<param name="turtle_name1" value="Tom"/>
<param name="turtle_name2" value="Jerry"/>
<rosparam file="$(find learning_launch)/config/param.yaml" command="load"/>
</node>
<node pkg="turtlesim" type="turtle_teleop_key" name="turtle_teleop_key" output="screen"/>
</launch>
learning_launch/launch/start_tf_demo_c++.launch:
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener" name="listener" />
</launch>
learning_launch/launch/turtlesim_remap.launch:
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/>
</node>
</launch>
~$ roslaunch learning_launch start_tf_demo_c++.launch
13. 常用可视化工具箱
~$ rqt_
rqt_bag rqt_graph rqt_plot
rqt_console rqt_image_view rqt_shell
rqt_dep rqt_logger_level rqt_topic
~$ rosrun rviz rviz
~$ roslaunch gazebo_ros willowgarage_world.launch
de" name=“sim”/>
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster" args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener" name="listener" />
learning_launch/launch/turtlesim_remap.launch:
<launch>
<include file="$(find learning_launch)/launch/simple.launch" />
<node pkg="turtlesim" type="turtlesim_node" name="turtlesim_node">
<remap from="/turtle1/cmd_vel" to="/cmd_vel"/>
</node>
</launch>
~$ roslaunch learning_launch start_tf_demo_c++.launch
13. 常用可视化工具箱
~$ rqt_
rqt_bag rqt_graph rqt_plot
rqt_console rqt_image_view rqt_shell
rqt_dep rqt_logger_level rqt_topic
~$ rosrun rviz rviz
~$ roslaunch gazebo_ros willowgarage_world.launch

















 569
569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









