






前言
在PCL中,用于处理点云表面的主要方法包括:泊松表面重建、贪心投影三角化、Alpha Shapes等。
本文介绍泊松表面重建,包括原理分析,思路流程,两个实践应用和代码。
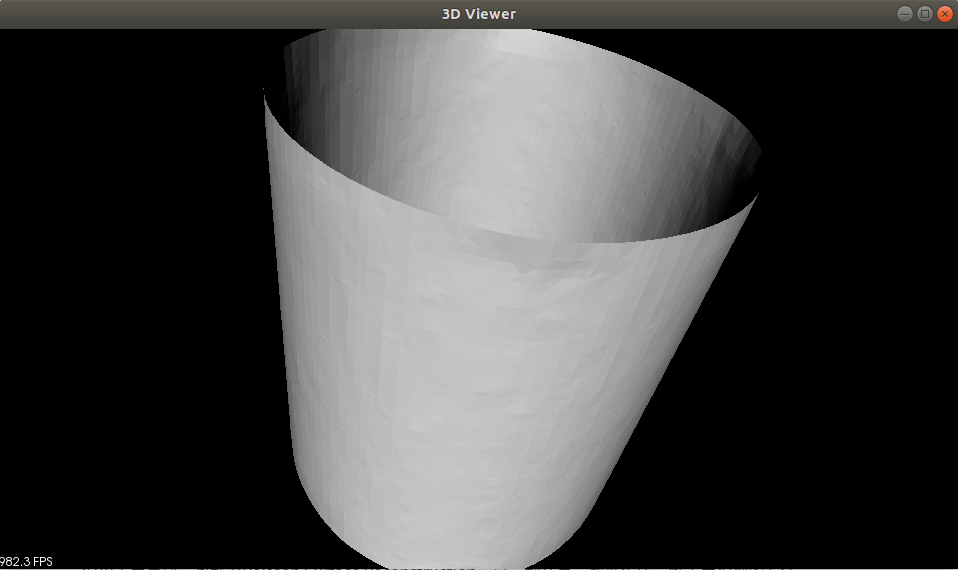
使用泊松算法,对三维点云表面重建,可视化效果:
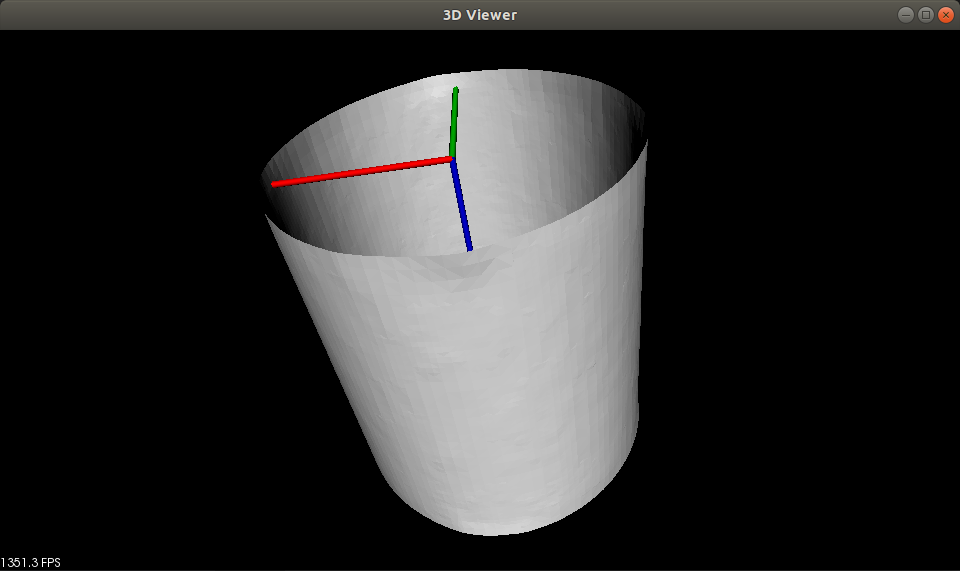
随机生成一个圆柱体的点云,并使用泊松表面重建算法,可视化效果。
1、泊松表面重建
泊松表面重建,也称为Poisson Surface Reconstruction,是一种从点云数据生成三维表面模型的方法。
- 点云是三维空间中的一组离散点,这些点没有连接信息,因此需要重建一个连续的表面。
- 泊松表面重建方法基于泊松方程,通过对点云中的法线进行全局最优化来生成表面。
- 它将表面重建问题转化为求解泊松方程的过程,结果是一个光滑的表面。
适用场景:
适用于有噪声和不规则分布的点云数据,特别是那些需要生成平滑表面的应用。
示例步骤:
- 估计点云中的法线。
- 构建八叉树(Octree)以分割空间。
- 使用泊松方程求解生成表面。
2、泊松表面重建思路流程
泊松表面重建的算法思路,如下所示:
2.1 数据准备
- 输入:一个点云数据集。
- 预处理:滤波,去除噪声和离群点。下采样,如果点云密度过高,可以进行下采样以减少计算量。
2.2 法向估计
- 目的:估计每个点的法向量,法向量是与点所在表面垂直的向量。
- 方法:可以使用PCA(主成分分析)或其他局部几何方法来估计法向量。
2.3 场函数构造
- 定义:构造一个三维标量场函数Φ,使得在点云的每个点处,该函数的梯度近似于法向量。
- 泊松方程:ΔΦ=∇⋅N,其中Δ是拉普拉斯算子,∇⋅N是法向量场的散度。
2.4 求解泊松方程
- 方法:将泊松方程离散化,并通过数值方法(如多重网格方法)求解。
- 结果:一个三维标量场函数Φ\PhiΦ。
2.5 等值面提取
- 定义:等值面是标量场中所有具有相同值的点的集合。
- 提取方法:使用Marching Cubes算法从标量场Φ中提取等值面,生成多边形网格。
2.6 表面平滑与后处理
- 目的:去除噪声并改善表面质量。
- 方法:对生成的表面进行平滑处理、孔洞填补和细节增强等。
泊松表面重建的优势:处理噪声数据的能力强、生成的表面平滑且闭合。
缺点:计算复杂度较高、对法向估计的依赖性较强。
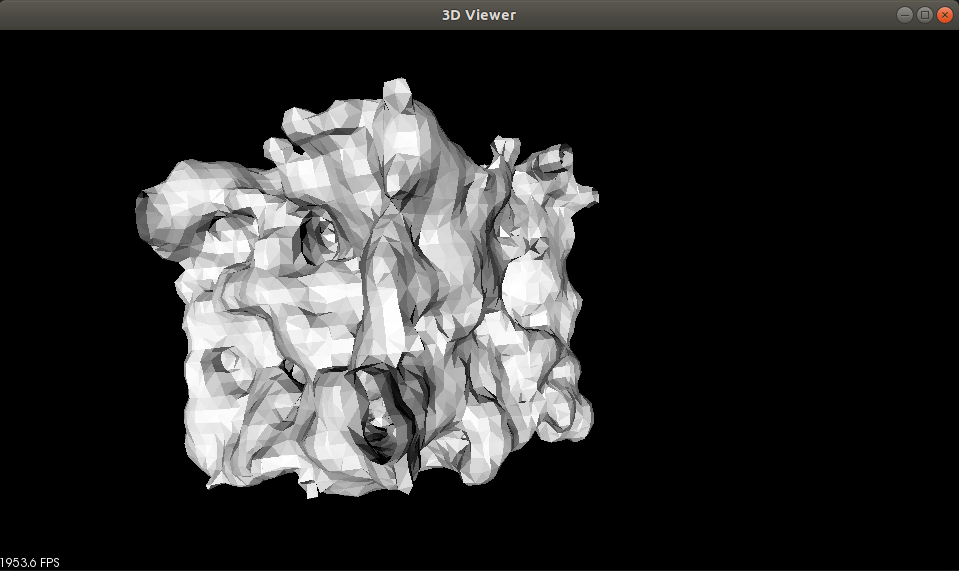
3、泊松表面重建——实践应用1
随机生成离散点云,并使用泊松表面重建方法处理点云数据并进行可视化。
- 生成随机点云数据:生成一个包含随机点的点云。
- 估计法线:计算每个点的法线信息。
- 泊松表面重建:使用泊松表面重建算法生成三维表面。
- 可视化:使用PCL的可视化工具展示结果。
示例效果:
示例代码:
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/poisson.h>
#include <pcl/filters/filter.h>
#include <random>
#include <thread>
#include <chrono>
int main() {
// 创建点云对象并生成随机点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
cloud->width = 1000;
cloud->height = 1;
cloud->points.resize(cloud->width * cloud->height);
// 使用随机数生成器生成点云数据
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_real_distribution<> dis(-1.0, 1.0);
for (auto& point : cloud->points) {
point.x = dis(gen);
point.y = dis(gen);
point.z = dis(gen);
}
// 估计法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(20);
ne.compute(*normals);
// 将点云和法线合并
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_with_normals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud, *normals, *cloud_with_normals);
// 泊松表面重建
pcl::Poisson<pcl::PointNormal> poisson;
pcl::PolygonMesh mesh;
poisson.setDepth(8); // 设置八叉树的深度
poisson.setSolverDivide(8); // 设置泊松方程求解的分区数
poisson.setIsoDivide(8); // 设置等值面提取的分区数
poisson.setPointWeight(4.0f); // 设置每个点对解的影响权重
poisson.setInputCloud(cloud_with_normals);
poisson.reconstruct(mesh);
// 可视化
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPolygonMesh(mesh, "mesh");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
return 0;
}
代码说明:
-
生成随机点云数据:使用C++标准库中的随机数生成器生成1000个随机点,每个点的坐标在[-1, 1]范围内。
-
估计法线:使用
NormalEstimation类计算每个点的法线。 -
合并点云和法线:将点云和法线信息合并成一个包含法线信息的点云。
-
泊松表面重建:使用
Poisson类进行三角化。设置参数包括八叉树深度、泊松方程求解分区数、等值面提取分区数和点权重。 -
可视化:使用
PCLVisualizer类可视化生成的三角网格。
4、泊松表面重建——实践应用2
生成一个圆柱体的密集点云,并使用泊松表面重建算法,进行表面重建和可视化。
- 生成圆柱的密集点云数据:生成一个圆柱形的点云。
- 泊松表面重建:使用Poisson算法进行表面重建。
- 可视化:使用PCL的可视化工具展示处理结果。
可视化效果:
示例代码:
#include <pcl/io/ply_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/poisson.h>
#include <random>
#include <thread>
#include <chrono>
// 生成圆柱体点云
void generateCylinderPointCloud(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud, float radius, float height, int num_points) {
std::random_device rd;
std::mt19937 gen(rd());
std::uniform_real_distribution<> dis_height(0, height);
std::uniform_real_distribution<> dis_angle(0, 2 * M_PI);
for (int i = 0; i < num_points; ++i) {
float h = dis_height(gen);
float angle = dis_angle(gen);
pcl::PointXYZ point;
point.x = radius * cos(angle);
point.y = radius * sin(angle);
point.z = h;
cloud->points.push_back(point);
}
cloud->width = cloud->points.size();
cloud->height = 1;
cloud->is_dense = true;
}
int main() {
// 创建点云对象并生成圆柱点云
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
generateCylinderPointCloud(cloud, 1.0f, 2.0f, 3000); // 半径1.0,高度2.0,点数3000
// 估计法线
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
ne.setInputCloud(cloud);
ne.setSearchMethod(tree);
ne.setKSearch(20);
ne.compute(*normals);
// 将点云和法线合并
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_with_normals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud, *normals, *cloud_with_normals);
// 泊松表面重建
pcl::Poisson<pcl::PointNormal> poisson;
pcl::PolygonMesh mesh;
poisson.setDepth(8); // 设置八叉树的深度
poisson.setSolverDivide(8); // 设置泊松方程求解的分区数
poisson.setIsoDivide(8); // 设置等值面提取的分区数
poisson.setPointWeight(4.0f); // 设置每个点对解的影响权重
poisson.setInputCloud(cloud_with_normals);
poisson.reconstruct(mesh);
// 保存结果
pcl::io::savePLYFile("poisson_cylinder_mesh.ply", mesh);
// 可视化
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPolygonMesh(mesh, "mesh");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
std::this_thread::sleep_for(std::chrono::milliseconds(100));
}
return 0;
}
代码说明:
-
生成圆柱的点云数据:
generateCylinderPointCloud函数生成一个圆柱形点云,参数包括圆柱的半径、高度和点的数量。 -
估计法线:使用
NormalEstimation类计算每个点的法线。 -
合并点云和法线:将点云和法线信息合并成一个包含法线信息的点云。
-
泊松表面重建:使用
Poisson类进行表面重建。设置八叉树深度、泊松方程求解的分区数、等值面提取的分区数和点权重。 -
保存和可视化:使用
PCLVisualizer类可视化生成的三角网格,并保存为PLY文件。
分享完成~


















 1084
1084

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











