







 本文详细介绍了载波模糊度固定算法,特别是针对GBMIRC产品的宽巷和窄巷模糊度固定过程,涉及周跳探测、多历元平滑、星间单差模糊度计算和整数最小二乘估计等技术。
本文详细介绍了载波模糊度固定算法,特别是针对GBMIRC产品的宽巷和窄巷模糊度固定过程,涉及周跳探测、多历元平滑、星间单差模糊度计算和整数最小二乘估计等技术。
(1)载波模糊度产生原理
- 这部分众多论文已有详尽描述,故而不再赘述,本文旨在硬核讲解模糊度固定算法。如果想细致了解可参考《GPS原理与接收机设计》与《GNSS精密单点定位理论方法及其应用》。
(2)无电离层模糊度固定整体流程(注意:本文暂不讲解部分模糊度固定,后续文章将细致讲解部分模糊度固定算法)
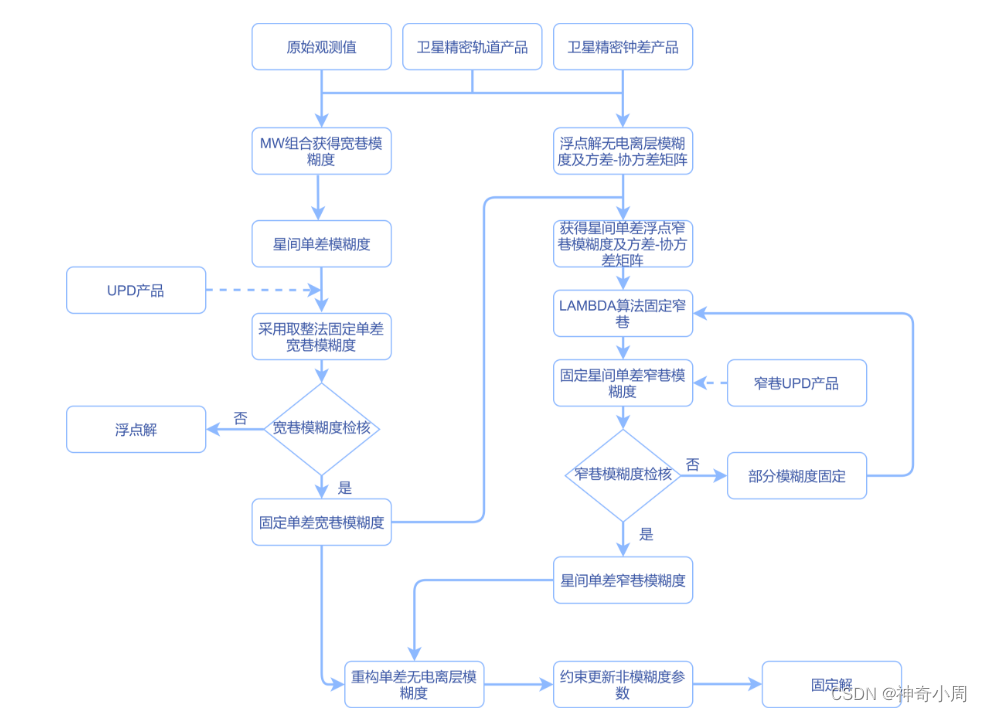
- 参考《GNSS精密单点定位及模糊度固定研究》
(3)宽巷模糊度固定算法(以GBM IRC产品为例)
- MW组合表示为载波相位观测值的宽巷组合+伪距观测值的窄巷组合得到,除了用于周跳探测外,还可用于产生宽巷模糊度浮点解,如下式所示。

- 由上式所产生的宽巷模糊度浮点解序列往往不够平稳(即不够准确),因此往往通过多历元平滑的方式获得更加精确的宽巷模糊度浮点解。

- 实际上上式宽巷模糊度浮点解还受到PCO的影响,因此在MW公式中亦可将其改正,公式可参考论文《Assessing IGS GPS/Galileo/BDS-2/BDS-3 phase bias products with PRIDE PPP-AR》
- 至此已获得相对准确的宽巷模糊度浮点解,通过选取最大高度角参考星(各系统分别选取,若存在BDS-2/BDS-3系统则也需要分开选取参考星)。并与非参考星形成星间单差宽巷模糊度浮点解(SD-Nwl-FLOAT),以及星间单差无电离层模糊度浮点解(SD-Nif-FLLOAT),值得注意得是(SD-Nwl-FLOAT)单位为cycle,而(SD-Nif-FLLOAT)单位为m(因此PPP浮点解解算得到的无电离层模糊度实际上包括其波长,而
无法直接表示出来)。
- 将GBM CLK头文件中的WL-UPD根据参考星与非参考星形成星间单差SD-WL-UPD,将其修正到相应星间单差宽巷模糊度上(SD-Nwl-FLOAT)- (SD-WL-UPD)
- 通过直接取整法固定星间单差宽巷模糊度ROUND,获得(SD-Nwl-FIX),再通过宽巷模糊度检核算法,如下图所示:
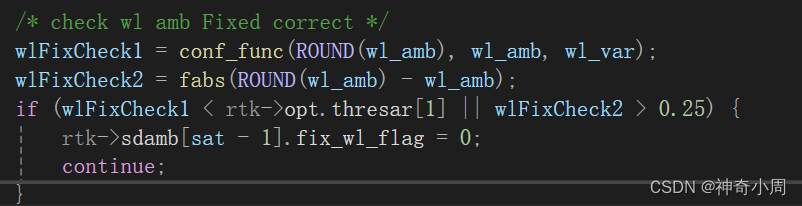
- 若通过同时(置信度+固定阈值)两个检核则说明宽巷固定正确,可进行后续步骤。
(4)窄巷模糊度固定算法(以GBM IRC产品为例)
- 在获得(SD-Nwl-FIX)与(SD-Nif-FLLOAT)以后即可由下式获得星间单差窄巷模糊度浮点解(SD-N1-FLOAT),(SD-N1-FLOAT)的方差协方差阵则由转移矩阵导出。
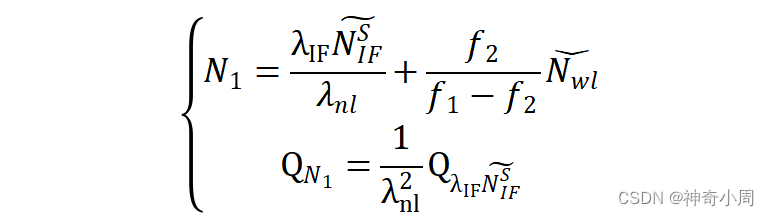
- 而转移矩阵的中的系数需要特别注意,因为此时的非单差的无电离层模糊度对应的方差-协方差阵的单位为m^2,而想要获得的(SD-N1-FLOAT)的方差协方差阵单位为cycle^2。即为下图所示设计矩阵系数才正确

- 当获得正确的(SD-N1-FLOAT)模糊度序列及其方差-协方差阵铜鼓LAMBDA算法即可获得(SD-N1-FIX)模糊度。LAMBDA算法参考rtklib相关算法即可,后续也可细致讲解其算法原理。
- 获得(SD-N1-FIX)模糊度后,还需要通过窄巷模糊度检核,一般使用ratio检验即(次优模糊度整数解残差同浮点模糊度与最优模糊度整数解残差平方和的比值来评估模糊度固定的可靠性),以及Bootstrapping 检验,同时通过两种算法则表示(SD-N1-FIX)模糊度固定正确。
(5)无电离层模糊度固定算法(以GBM IRC产品为例)
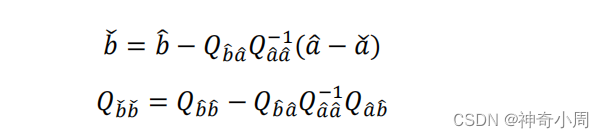
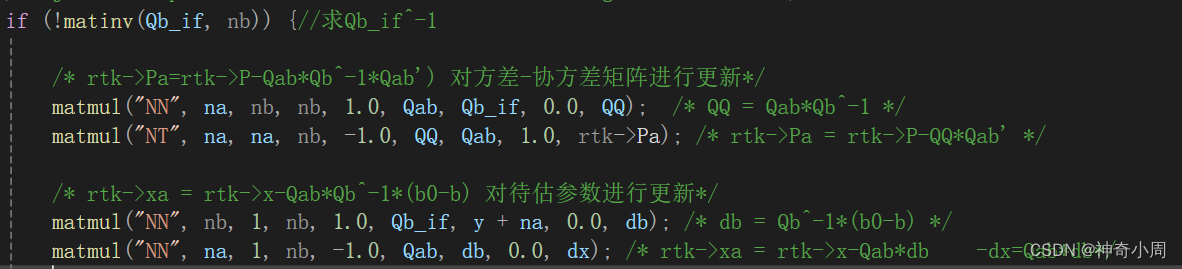
- 在获得正确(SD-Nwl-FIX)与(SD-N1-FIX)后,即可由(4)中公式反推获得单差无电离层模糊度固定解(SD-Nif-FIX),通过将非单差的无电离层模糊度对应的方差-协方差阵(m^2)转换为星间单差的无电离层模糊度对应的方差-协方差阵(m^2),即下图设计矩阵系数

- 通过整数最小二乘算法(ILS),利用(SD-Nif-FIX)与非模糊度参数(坐标偏差、接收机钟差、ISB、对流层湿延迟)的相关性即可完成对非模糊度参数的更新。关于整数最小二乘后续可细致讲解,另外还可通过卡尔曼滤波更新,其算法与ILS截然不同,但听闻效果类似(但并未见有人测验过)
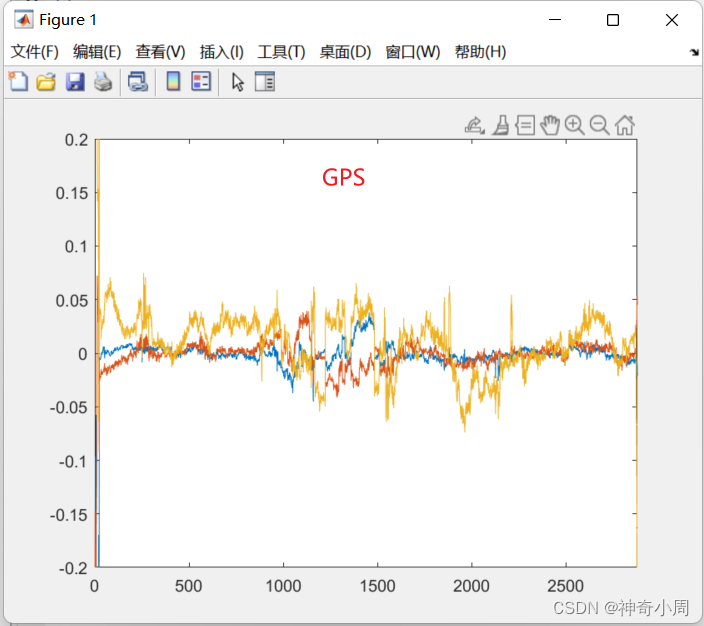
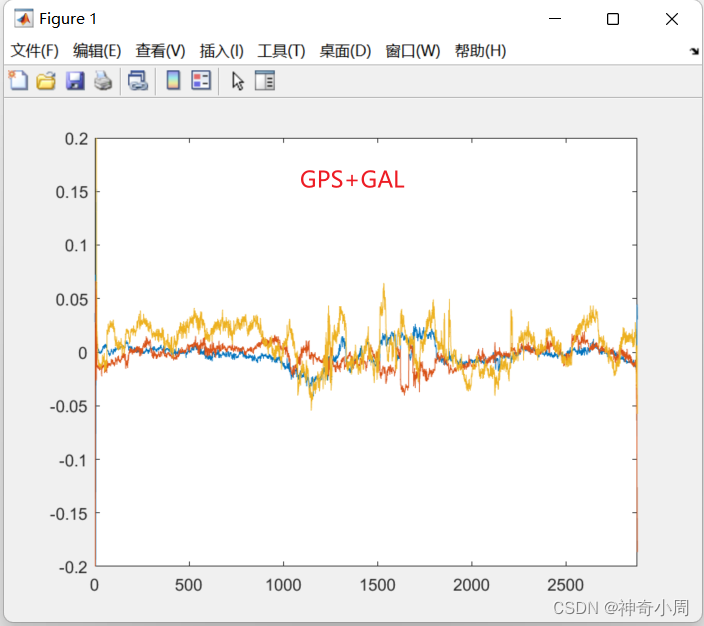
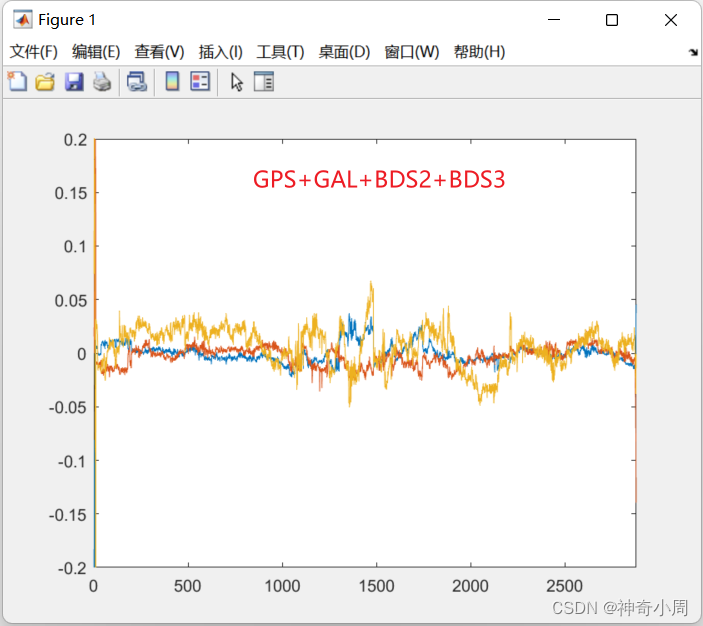
(6)无电离层模糊度固定效果图(以GBM IRC产品为例:仿动态模式由于展示图均使用部分模糊度算法,因此固定率均在95%以上)
欢迎评论区与私聊讨论学习!!!

















 955
955

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









