






物体在坐标系中的位置和方向是姿态。
4轴机器人标定TCP(两点法或三点法):
四轴机器人的TCP只有XY,没有其他四个轴。
两点法:根据两点的(X,Y,R)计算。根据两点的xy偏移与角度的偏移确定一个扇形的原点。
三点法:根据三点的(X,Y)计算。三点确定圆心。
6轴机器人标定TCP(四点法):TCP用来标定工具旋转中心位置
示教四个位置P1 P2 P3 P4。每个位置的工具的Z轴角度间隔在45-90之间且不在同一个平面。最终TCP为(X,Y,Z,0,0,0)

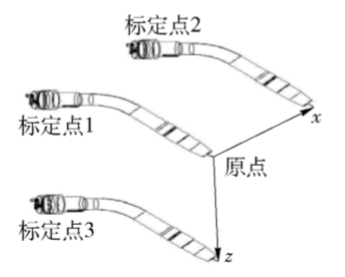
6轴机器人标定带TCF(6点法-X/Z):TCF是用来标定工具旋转中心位置加上工具的进给方向(工具的姿态标定)
6轴带TCF的是在6轴TCP的基础上添加两个点。
P5点沿工具的+X方向移动最好移动100mm以上。
P6点沿工具的+Z方向移动最好移动100mm以上。(工具升降的方向)
保持P4、P5、P6的姿态不变,P5以P4为基点沿着作业平台的+X方向移动,P6以P4为基点沿着作业平台的+Z方向移动

















 4807
4807

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









