







非线性优化
主要目标:
- 理解最小二乘法的含义和处理方式
- 理解高斯牛顿法(Gauss-Newton‘s Method)、列文伯格-马夸尔特方法(Levenburg-Marquadt's Method)
- 学习ceres和g2o库的基本用法
综合之前的,我们熟悉了运动方程和观测方程。方程中的位姿可以由变换矩阵来描述,然后用李代数进行优化。观测方程由相机模型给出,其中内参是随相机固定的,而外参则是相机的位姿。。我们大约弄清了SLAM在视觉模型下的具体表达。
然而,由于噪声的存在没运动方程和观测方程肯定不是精确成立的,尽管相机可以非常好的符合针孔模型,但是很遗憾我们得到的数据经常受到各种噪声的影响。即使有高精度 的相机,运动方程和观测方程也只能是近似成立。
与其假设数据必须符合方程,不如讨论如何在有噪声的数据中进行准确的状态估计。
基本的非线性优化方法,同时介绍ceres和g2o
6.1 状态估计问题
6.1.1 批量状态估计与最大近似后验估计
接着前面鸡哥博客的内容。回顾下第二讲的经典SLAM模型,
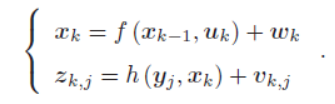
xk是相机的位姿,可以用SE(3)来描述。观测方程,即针孔模型,我们讨论下具体参数化形式,首先位姿变量xk可以由Tk表达。其次,运动方程与输入的人具体形式有关。观测方程由针孔模型给出。假设在xk处对路标yj进行了一次观测,对应到图像上的像素位置zk,j,那么观测方程可以表示为:

其中K为相机内参,s为像素点的距离,以是K(Rkyj+tk)的第三个分量。当然可以用变换矩阵来描述,这个时候就要用齐次坐标了。回头再转为非齐次坐标。
现在,考虑数据受噪声影响后会发生什么改变。再运动和观测两个方程中,我们通常假设两个噪声项wk,vk,j满足零均值的高斯分布,像这样:
![]()



6.1.2 最小二乘的引出



6.2 非线性最小二乘


























 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









