







创建功能包fixed_route
1. 自定义路径规划头文件my_global_planner.h
/** include the libraries you need in your planner here */
/** for global path planner interface */
#include <ros/ros.h>
#include <costmap_2d/costmap_2d_ros.h>
#include <costmap_2d/costmap_2d.h>
#include <nav_core/base_global_planner.h>
#include <geometry_msgs/PoseStamped.h>
#include <angles/angles.h>
#include <base_local_planner/world_model.h>
#include <base_local_planner/costmap_model.h>
#include <tf/transform_broadcaster.h>
using std::string;
#ifndef GLOBAL_PLANNER_CPP
#define GLOBAL_PLANNER_CPP
namespace my_global_planner {
class MyGlobalPlanner : public nav_core::BaseGlobalPlanner {
public:
MyGlobalPlanner();
MyGlobalPlanner(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
/** overridden classes from interface nav_core::BaseGlobalPlanner **/
void initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros);
bool makePlan(const geometry_msgs::PoseStamped& start,
const geometry_msgs::PoseStamped& goal,
std::vector<geometry_msgs::PoseStamped>& plan
);
};
};
#endif
2. 自定义路径规划算法my_global_planner.cpp
#include <pluginlib/class_list_macros.h>
#include "fixed_route/my_global_planner.h"
//register this planner as a BaseGlobalPlanner plugin
PLUGINLIB_EXPORT_CLASS(my_global_planner::MyGlobalPlanner, nav_core::BaseGlobalPlanner)
using namespace std;
//Default Constructor
namespace my_global_planner {
MyGlobalPlanner::MyGlobalPlanner (){
ROS_ERROR("hello MyGlobalPlanner");
}
MyGlobalPlanner::MyGlobalPlanner(std::string name, costmap_2d::Costmap2DROS* costmap_ros){
initialize(name, costmap_ros);
ROS_ERROR("hello MyGlobalPlanner initialize");
}
void MyGlobalPlanner::initialize(std::string name, costmap_2d::Costmap2DROS* costmap_ros){
ROS_ERROR("hello MyGlobalPlanner initialize");
}
bool MyGlobalPlanner::makePlan(const geometry_msgs::PoseStamped& start, const geometry_msgs::PoseStamped& goal, std::vector<geometry_msgs::PoseStamped>& plan ){
ROS_ERROR("hello MyGlobalPlanner makePlan");
plan.push_back(start);
for (int i=0; i<20; i++){
geometry_msgs::PoseStamped new_goal = goal;
tf::Quaternion goal_quat = tf::createQuaternionFromYaw(1.54);
new_goal.pose.position.x = -2.5+(0.05*i);
new_goal.pose.position.y = -3.5+(0.05*i);
new_goal.pose.orientation.x = goal_quat.x();
new_goal.pose.orientation.y = goal_quat.y();
new_goal.pose.orientation.z = goal_quat.z();
new_goal.pose.orientation.w = goal_quat.w();
plan.push_back(new_goal);
}
plan.push_back(goal);
return true;
}
};
3. 配置CMakeLists.txt文件
add_library(my_global_planner_lib src/my_global_planner.cpp)
4. 配置package.xml文件
<build_depend>nav_core</build_depend>
<exec_depend>nav_core</exec_depend>
<export>
<!-- Other tools can request additional information be placed here -->
<nav_core plugin="${prefix}/my_global_planner_plugin.xml" />
</export>
5. 自定义插件描述文件my_global_planner_plugin.xml
<!-- 注意修改lib的路径及名称 -->
<library path="lib/libmy_global_planner_lib">
<!-- name是命名空间名/类名,move_base_param.yaml全局规划名称一致,type是命名空间名::类名 -->
<class name="my_global_planner/MyGlobalPlanner" type="my_global_planner::MyGlobalPlanner" base_class_type="nav_core::BaseGlobalPlanner">
<description>This is a global planner plugin by zhank fixed_route project.</description>
</class>
</library>
my_global_planner_plugin.xml路径与CMakeLists.txt文件和package.xml文件处于同级目录。
编译运行后,使用如下命令可以查看注册的插件
rospack plugins --attrib=plugin nav_core
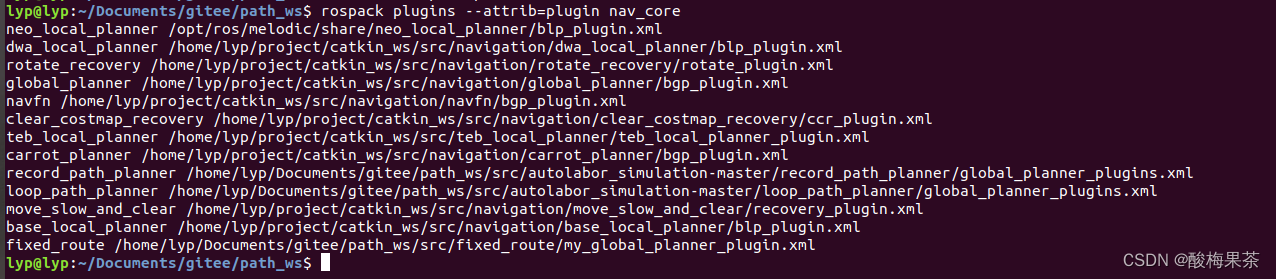
fixed_route /home/lyp/Documents/gitee/path_ws/src/fixed_route/my_global_planner_plugin.xml
6. move_base中使用插件
(1) move_base_params.yaml 使用插件
# 命名空间名/类名 与my_global_planner_plugin.xml中的name一致
base_global_planner: "my_global_planner/MyGlobalPlanner"
(2) global_planner_params.yaml 调用插件的配置参数
ns: GlobalPlanner
allow_unknown: true
default_tolerance: 0.0
visualize_potential: false
use_dijkstra: true
use_quadratic: true
use_grid_path: false
old_navfn_behavior: false
(3) gmapping_navigation.launch 在launch文件里找到ns为GlobalPlanner的配置参数
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find simulation_launch)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find simulation_launch)/param/global_costmap_params.yaml" command="load" ns="global_costmap"/>
<rosparam file="$(find simulation_launch)/param/local_costmap_params.yaml" command="load" ns="local_costmap"/>
<rosparam file="$(find simulation_launch)/param/global_planner_params.yaml" command="load" ns="GlobalPlanner"/>
<rosparam file="$(find simulation_launch)/param/dwa_local_planner_params.yaml" command="load" ns="DWAPlannerROS"/>
</node>
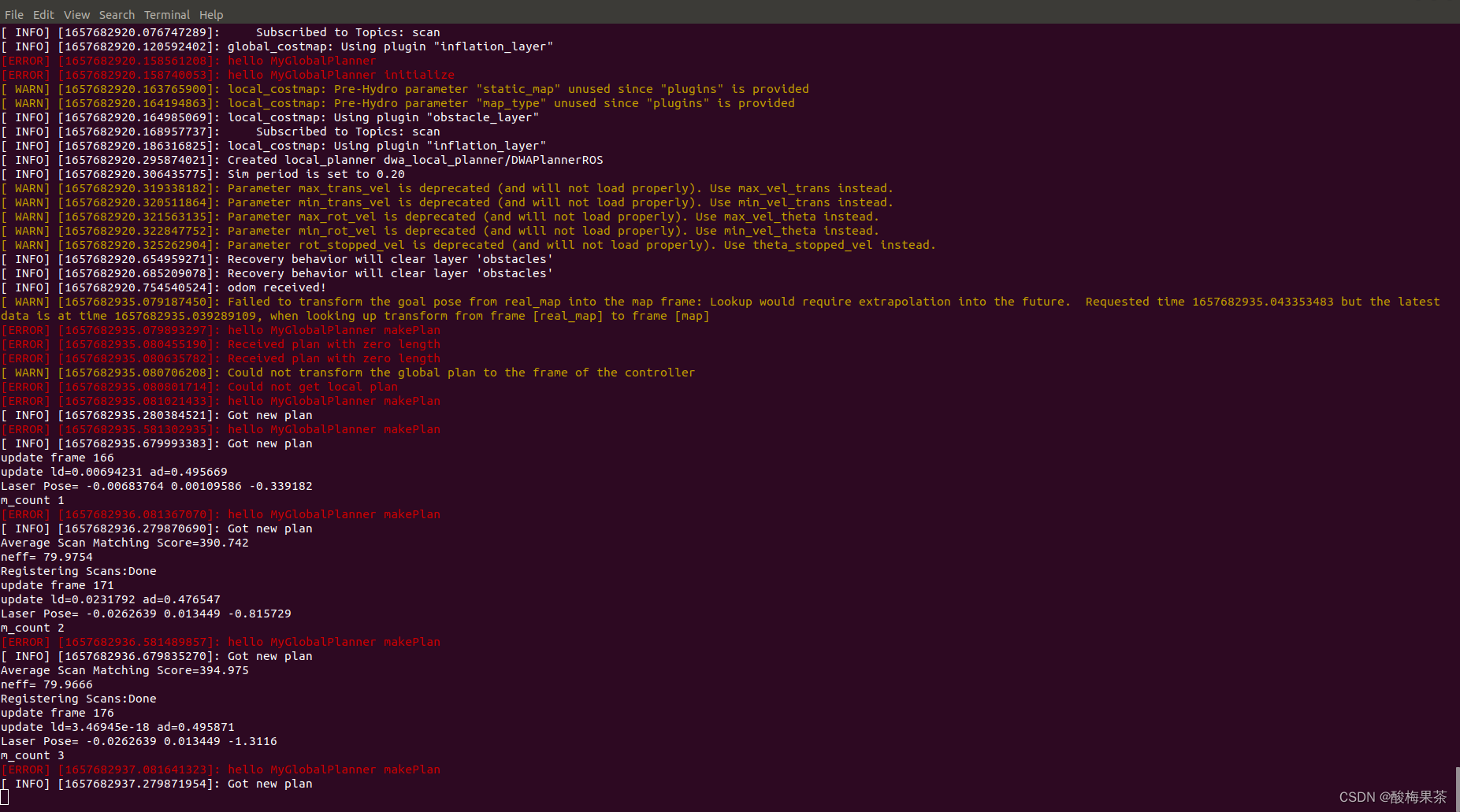
7. 验证
catkin_make
source devel/setup.bash
roslaunch simulation_launch gmapping_navigation.launch
出现下面红色报错信息,说明已经加载运行自定义的全局路径规划了。
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









