






卫星发出一串速度近似光速c的卫星信号,卫星信号包含的内容如图1所示,高频的载波载着测距码与导航电文 穿梭于天地之间。经过时间△t后被接收机接收,△t通过将卫星信号中的测距码与本地复制码做相关性计算可求得,将c与△t相乘便可求得卫星与接收机之间的距离。
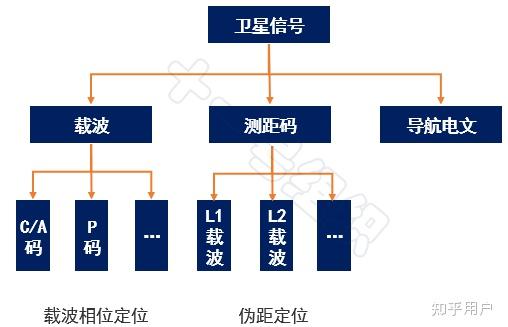
卫星位置可以通过解析卫星信号导航电文中的卫星星历 获得,通过再建立接收机与其他可观测卫星 的几组方程组 ,接收机在地面的三维空间坐标(x,y,z)便可通过解方程组顺利求出,这便是卫星定位中的伪距定位法。
伪距定位法使用测距码(C/A码或P码等)作为量测信号,考虑到一般接收机对测距码码元宽度的接收精度为1%~2%,而测距码的一个码元宽度又较大(C/A码为300m,P码为30m),所以米级定位精度是伪距定位法的理论极限,强求不得。
但是运载测距码和导航电文的载波,频率高、波长短,如果能测量出传播路径上载波在两点之间的相位差 ,那么两点之间的距离也可以求出来。以北斗为例,北斗三代B1频点载波的中心频率 为1575.42MHz,换算成波长约为190mm,而按照测距精度为载波波长的1%~10%计算,理论上可以实现毫米级定位。
利用载波相位进行测量的原理如图2所示。
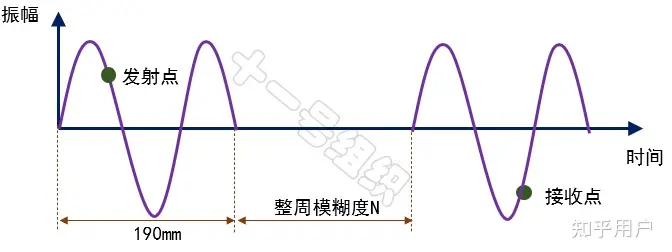
但现实情况是,使用载波相位定位方法的精度实际上只能控制在3m左右,与自动驾驶需求的厘米级定位精度相差甚远、与理论上可达到的毫米级定位精度相差更远。这样的定位精度还以引入周跳和整周模糊度N等一系列难题为代价。
我们不禁要问,究竟是哪个环节出现问题导致卫星定位误差如此大呢?经过科学家们的不断研究,发现影响卫星定位精度的因素主要有三类:卫星相关误差、传播路径相关误差和接收机相关误差,各类误差汇总如图3所示。
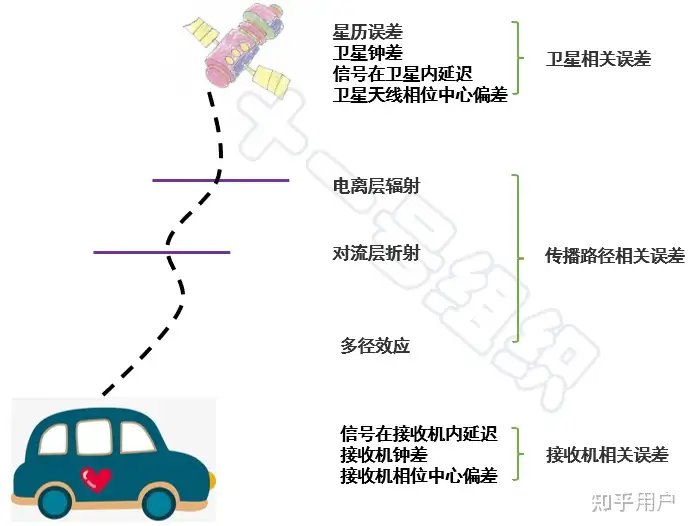
而在如何消除这些误差、提高卫星定位精度的道路上,逐渐形成两条不同的技术路线:差分方法和非差方法。
差分方法的理论基础是:上述三大类误差中除多径效应 外,均具有较强的空间相关性,将一定空间内两台接收机的观测值 作差,可以消除这些空间相关性误差。
比如,当两台接收机同步接收同一颗卫星信号,那么观测值中就包含了相同的卫星钟差,将两观测值作差便可消除此项误差;同理,一台接收机在同一时刻接收两颗卫星信号,那么观测值中就包含了相同的接收机钟差,将两观测值作差便可消除此项误差。其他误差类似,经过两次减法可以消除了大部分影响卫星定位的误差。
究竟是在测距码层面作差还是载波相位层面作差,又将差分方法分成了码差分法 和载波相位差分方法。
码差分法中,基准站一方面基于观测值计算出伪距,另一方面基于基准站已知坐标和各卫星的坐标,求出每颗卫星每一时刻到基准站的真实距离,将真实距离与伪距作差,得出伪距改正信息,并广播给接收机。
载波相位差分,就是当前耳熟能详的传统RTK所采用的方案,整个系统包括卫星、基准站、流动站(各种类型的GNSS接收机)、电台等,如图4所示。
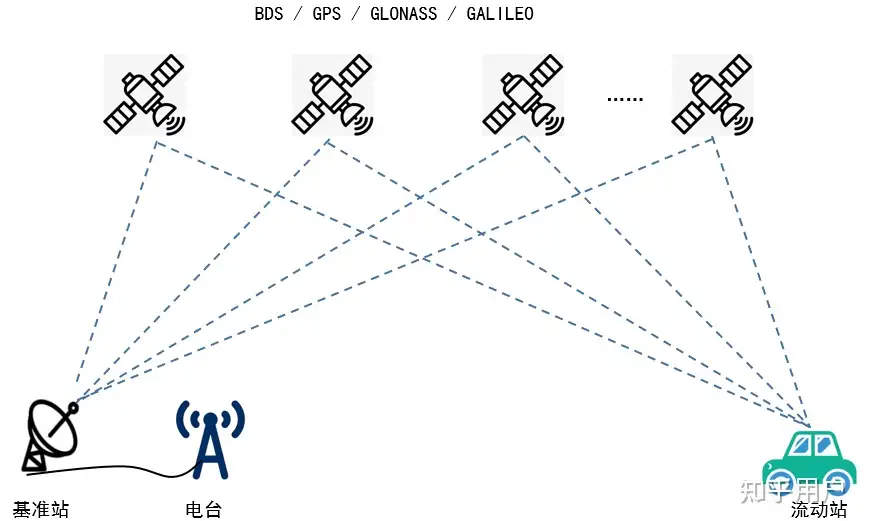
工作时,基准站和流动站都在观测卫星载波信号 。基准站通过电台将观测到的卫星载波信号广播出去,流动站收到基准站发送的信号后,与自身观测到的卫星载波信号进行双差模糊度的求解、基线向量的结算,从而精确地求出流动站与基准站的空间相对位置关系。随后通过坐标转换 ,将相对位置关系转换成用户需要的坐标。
经过RTK这么一操作,卫星定位的精度平面可达1cm+D·1ppm ,高程可达2cm+D·1ppm。其中,D为移动站与基准站的距离,1ppm值为百万分之一,这意味着移动站离基准站每超过1公里,平面和高程就会多1毫米的误差。
传统RTK的定位精度、实时性均已足够优秀,且实施简单,哪里需要就去哪里搭建这样一套系统,但是考虑到自动驾驶车辆不会永远只在限定区域内测试,如何建立一个能够覆盖区域甚至全球的系统,考验着服务提供商的财力和智力。
更不可接受的是,传统RTK中卫星定位误差的空间相关性随移动站距离基准站的距离增加而逐渐失去线性,因此在超长距离下(约>30km),经过载波相位差分运算后,有可能无法解算出载波相位的整周模糊度,从而导致定位精度直接变为分米级或米级。
为了克服传统RTK技术的缺陷,在20世纪90年代中期,人们提出了网络RTK(Network RTK,NRTK)技术。
在NRTK中,普通基准站被升级为了连续运行参考站(Continuously Operating Reference Stations , CORS),并组成一个CORS系统,系统组成如图5所示。
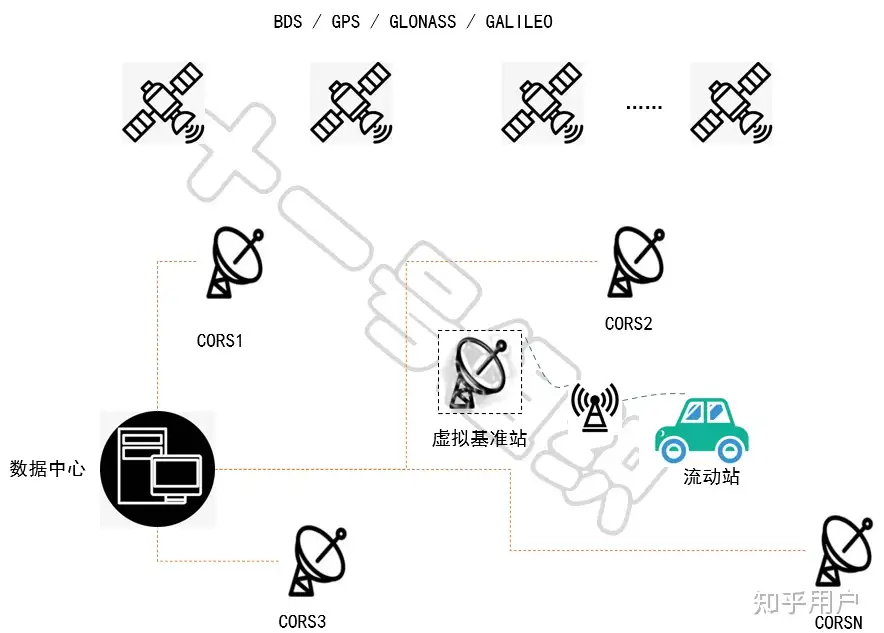
系统中的CORS通过数据通讯网络将观测值传输至一个或多个数据处理中心,数据处理中心结合基线处理与观测值内插技术,模拟出一个“虚拟基准站”(或选择距离流动站最近一个CORS),通过网络向移动站播发“虚拟基准站”(或距离最近CORS)的观测值、差分改正等信息。
这意味着,在一定区域内,NRTK可以实现无缝覆盖。对于用户来说,使用NRTK,不需要自建基准站,只需要花点小钱买网络RTK服务及支付通讯费用即可,节约了大量成本。精度和可靠性还更高,毕竟CORS系统坏一两个站并不影响大局。
但是对于服务商来说,要想提供大范围的无缝覆盖,无论是RTK还是NRTK,建设成本都极高。但是一旦建成,就可以源源不断享受用户付费的过程,类似建成后的高速公路 。
但是NRTK也不是没有缺点,其定位精度受网络稳定性影响极大,为了实现高精定位必须保证网络通信 稳定。这对一些偏僻山区地区道路或网络覆盖不是那么好的道路,还是挺有难度,因此自动驾驶车辆通常采用基于NRTK的融合定位策略。















 702
702











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









