







文章目录
一、采样点的概念
采样点是节点判断信号逻辑电平的位置,对CAN总线来说极其重要,尤其在整车组网的时候,多个节点要保持同一个采样点。
CAN网络在通信过程需要通过对总线电平进行采样,从而判断信号逻辑是0还是1.若网络中节点采样点不一致可能会导致同样的采样频率出现采样错误,进而使整个网络出现故障。
二、采样点的规则及原理
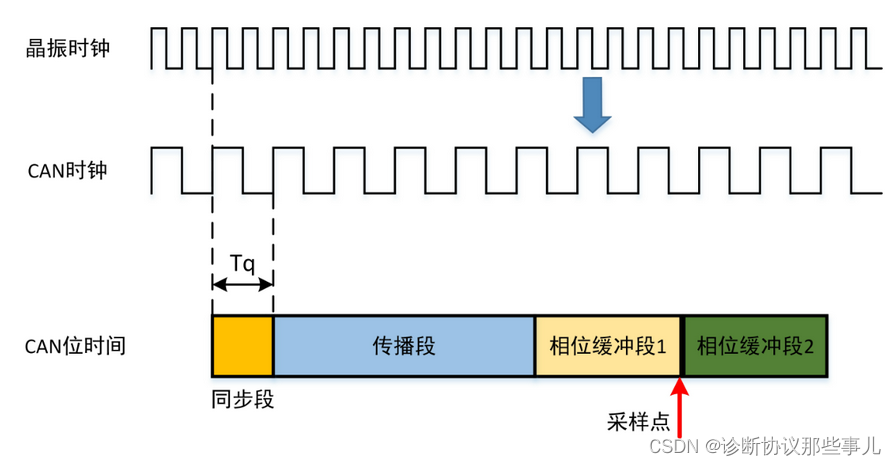
2.1 位时序
由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为 4 段。
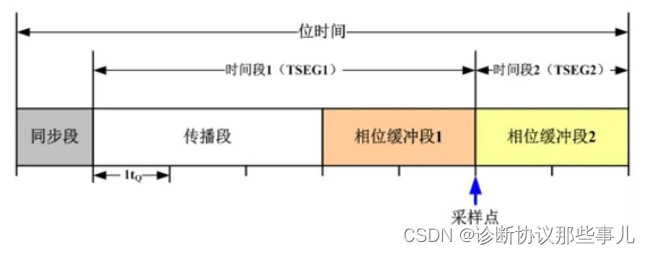
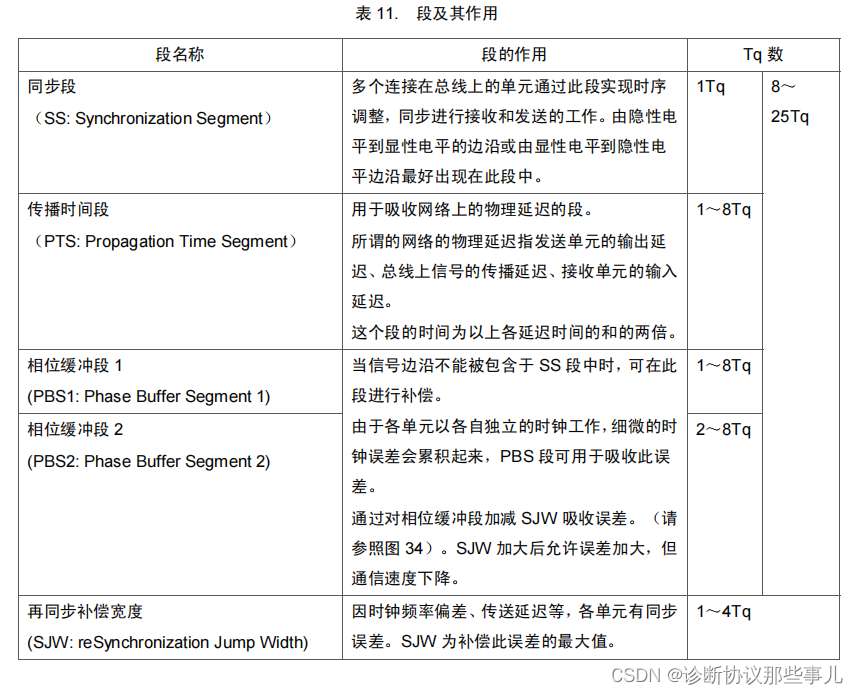
• 同步段(SS)
• 传播时间段(PTS)
• 相位缓冲段 1(PBS1)
• 相位缓冲段 2(PBS2)
这些段又由可称为 Time Quantum(以下称为 Tq)的最小时间单位构成。
1 位分为 4 个段,每个段又由若干个 Tq 构成,这称为位时序。
1 位由多少个 Tq 构成、每个段又由多少个 Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。
所谓采样点是读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。
由于相位缓冲段1和相位缓冲段2能够延长或缩短,采样点也能够随之变化。
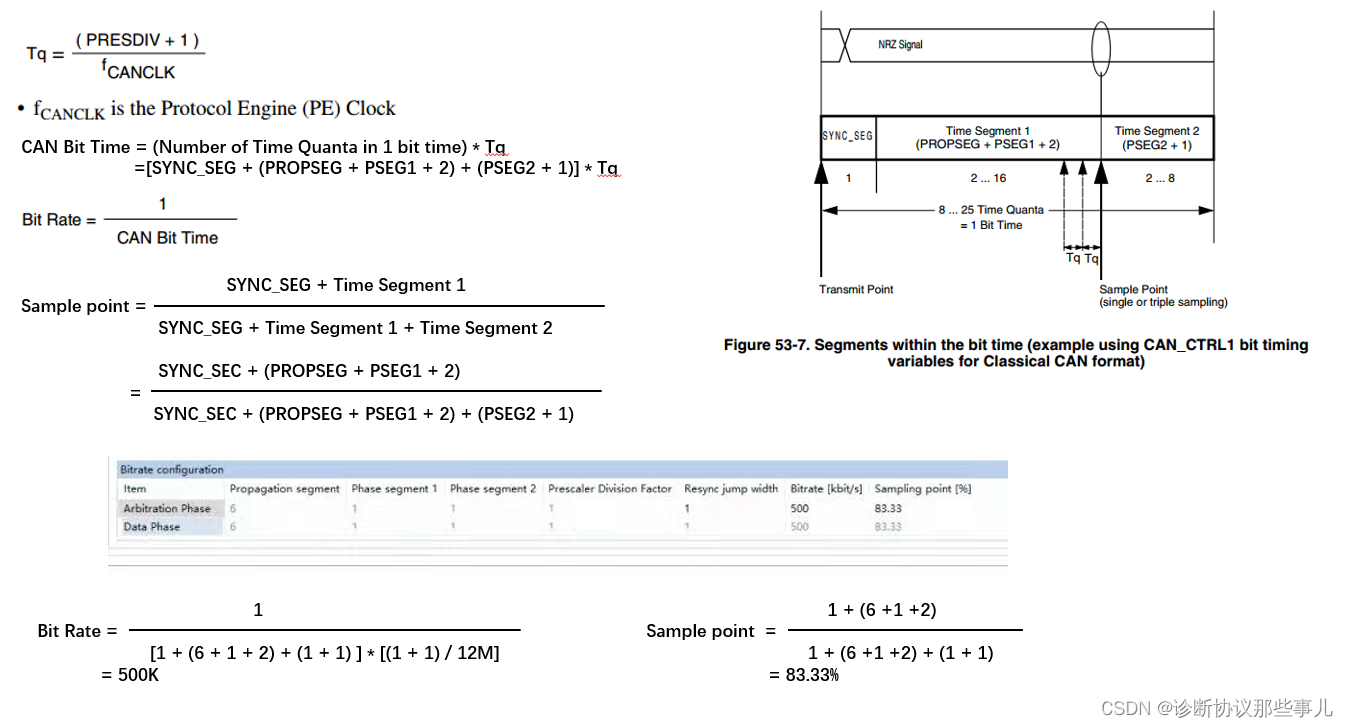
2.2 采样点计算公式
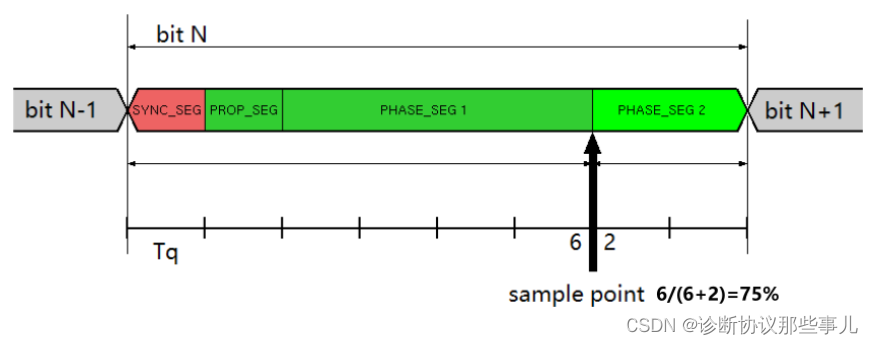
采样点计算公式为:

由于同步段SYNC_SEG总是占用一个Tq,因此可转化为:
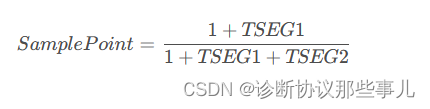
有关采样点的配置,根据CiA(CAN in Automation)的建议是:
(1)一般配置在75-80%的位置
(2)选择采样点位置在85%左右为佳
(3)波特率 > 800K:75% 波特率 > 500K:80% 波特率 <= 500K:87.5%
2.3 Tq(时间份额)
晶振时钟周期:由晶振频率决定,指振荡器每振荡一次所消耗的时间长度,也是整个系统中最小的时间单位。
CAN时钟周期:CAN时钟是由系统时钟分频而来的一个时间长度值,实际上就是一个时间份额Tq
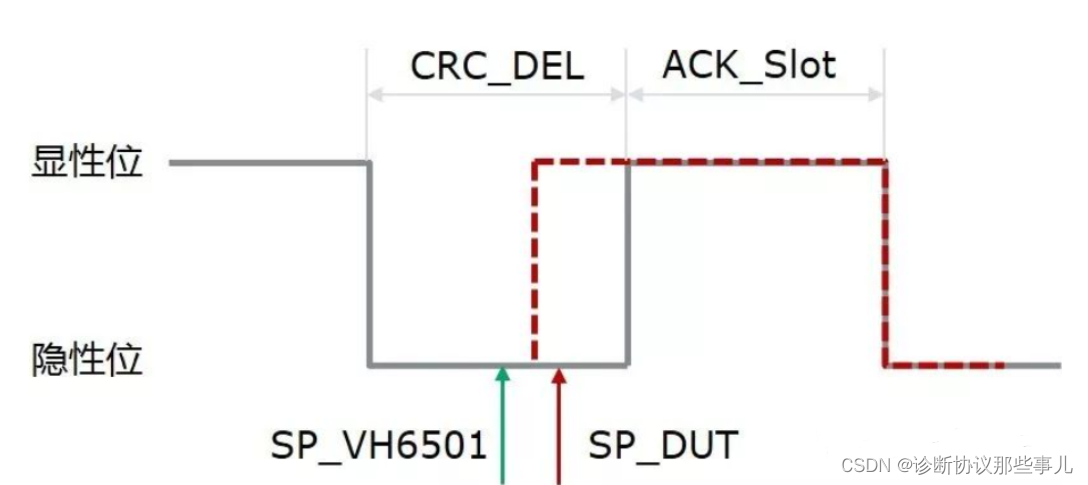
三、采样点的测试方法
采样点的测试方法:干扰某一位的采样点附近的总线电平,利用CAN错误帧机制,根据ECU是否发送错误帧来判断是否出现采样错误,进而计算ECU的采样点。根据ECU角色的不同,采样点测试的方法可以分为两类:以ECU作为发送节点,干扰它发送的报文;以ECU作为接收节点,干扰它接收的报文。
实际测试环境的总线干扰设备采用VH6501,并以待测ECU作为接收节点,使用VH6501构建仿真报文,然后从后往前逐次翻转仿真报文数据场的时间份额的电平极性,直到总线上出现错误帧。

① 在开始采样点测试之前,我们需要设置VH6501自身的采样点;
② VH6501使用一连串的脉冲电平来构建仿真报文;
③ 从后往前逐次翻转仿真报文数据场的各个脉冲的电平极性,直到干扰到待测ECU的采样点,使得待测ECU发送错误帧。
在执行采样点的测试过程中,我们使用示波器截获CAN总线上的波形。样件使用500 Kbps的传统CAN,即位时间为2 μs。示波器时基设置为8 μs,即一个横格可容纳4个位。
四、补充
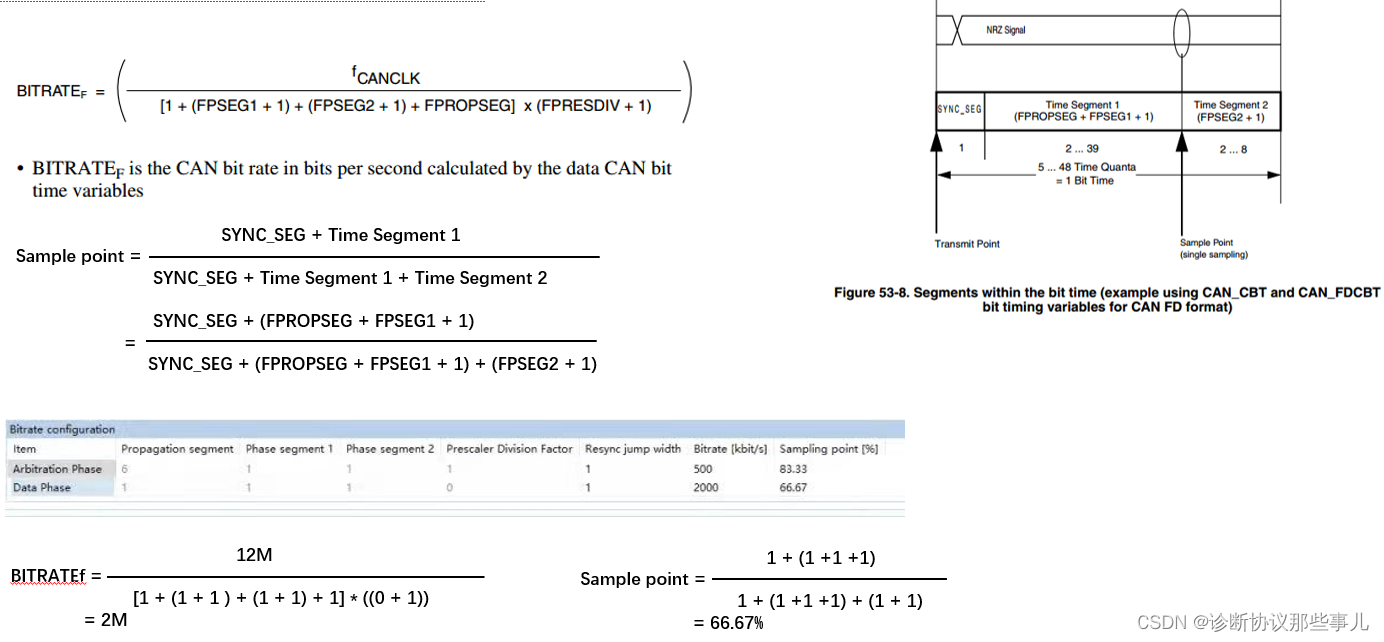
4.1 CAN FD仲裁段波特率和采样点计算
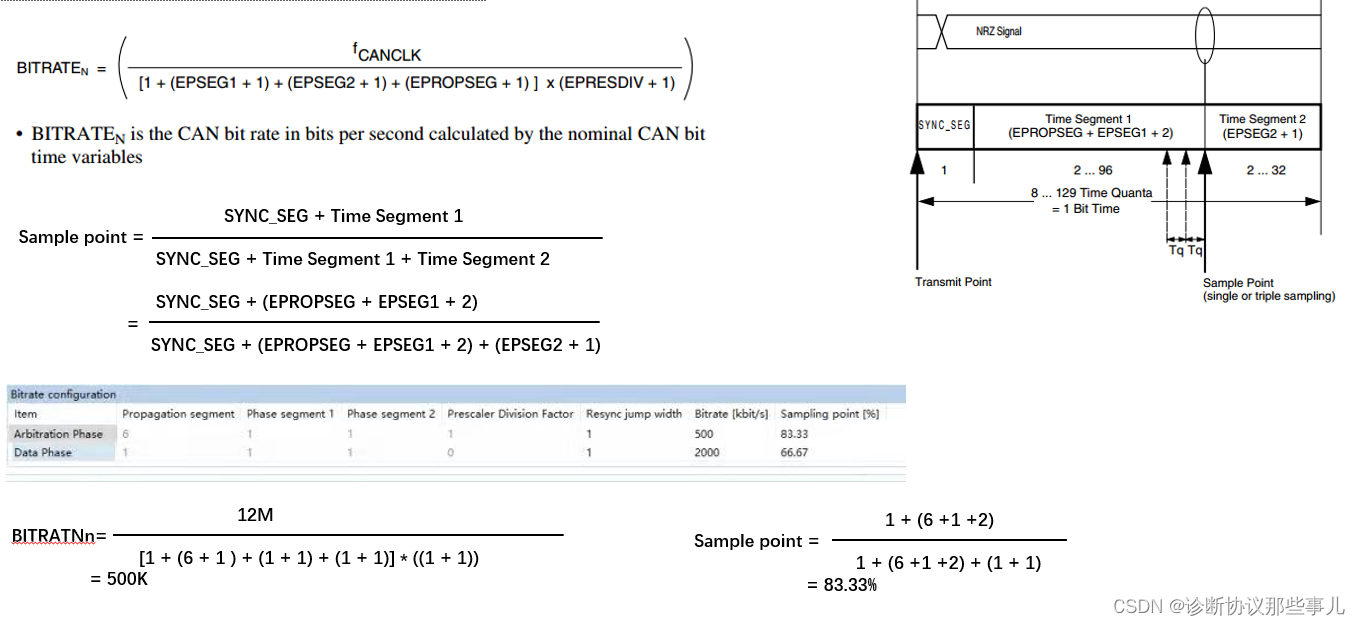
4.2 CAN FD数据段波特率和采样点计算
















 696
696











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











