






 实验室对禾赛AT128雷达进行基础研究,每秒处理约6250个点云包(单回波,10Hz),对应约125°水平视场角。SDK采用多线程解析,m_stepSize设定为处理200个包。
实验室对禾赛AT128雷达进行基础研究,每秒处理约6250个点云包(单回波,10Hz),对应约125°水平视场角。SDK采用多线程解析,m_stepSize设定为处理200个包。
我们实验室会做各类传感器的基础使用研究,本文针对市面上前装量产比较多的禾赛AT128雷达展开
Wireshark抓包
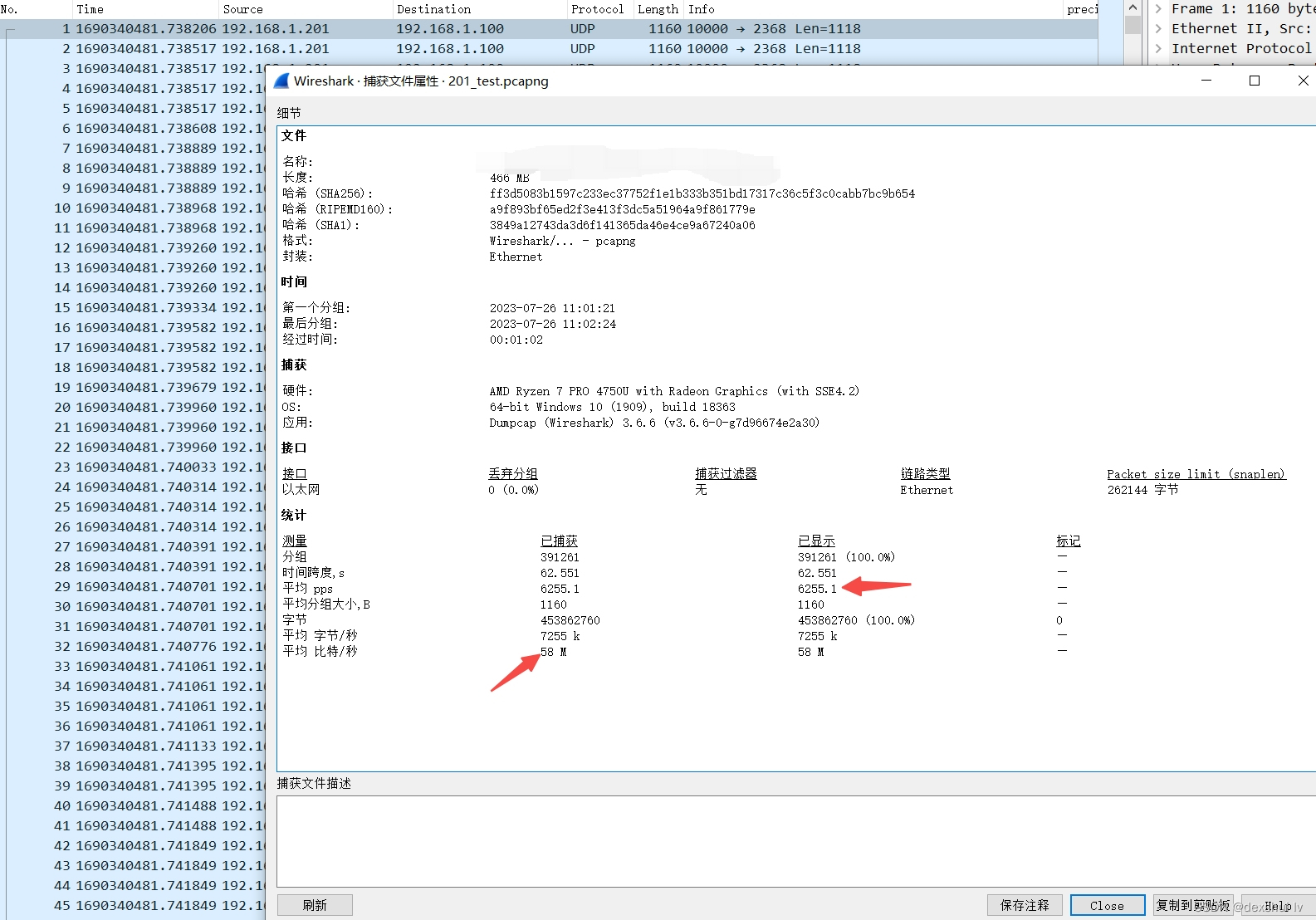
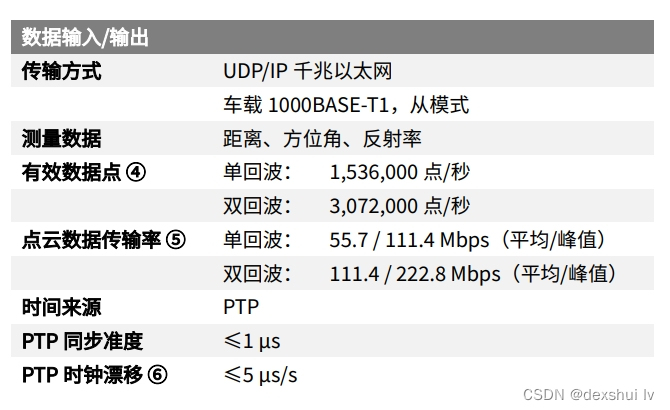
每秒大概在6250个点云包左右(单回波,10Hz)
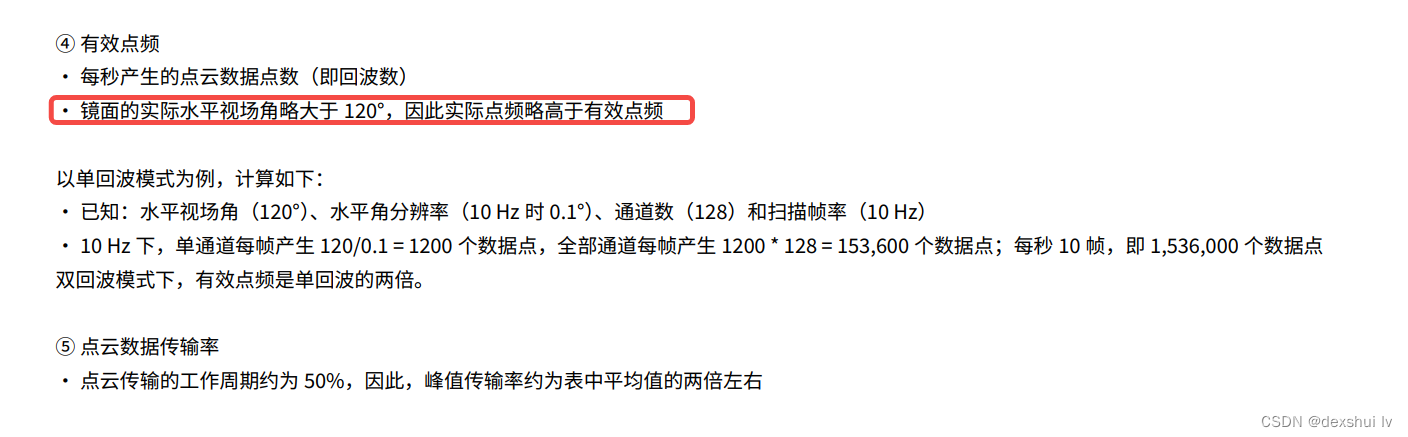
可能是因为水平视场角比120°大,6250个包大概对应6250/10hz*0.2(Packets间隔) = 125°左右。
SDK部分
AT128 SDK中是多线程解析的,看代码中m_stepSize是200个包;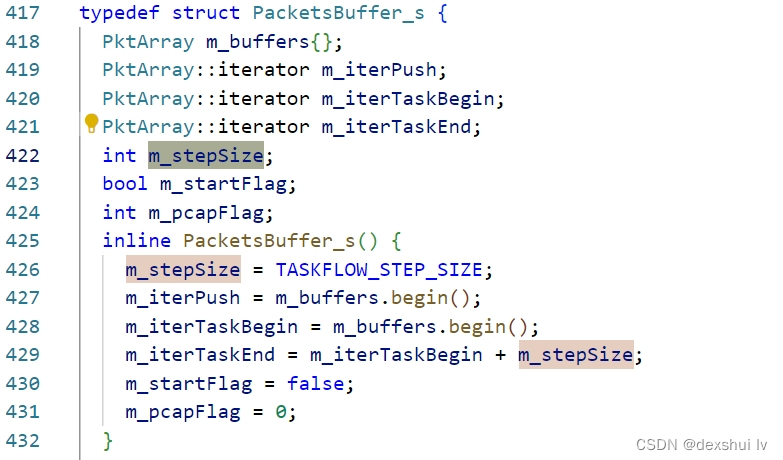
我们实验室会做各类传感器的基础使用研究,本文针对市面上前装量产比较多的禾赛AT128雷达展开
每秒大概在6250个点云包左右(单回波,10Hz)
可能是因为水平视场角比120°大,6250个包大概对应6250/10hz*0.2(Packets间隔) = 125°左右。
AT128 SDK中是多线程解析的,看代码中m_stepSize是200个包;
 3417
3417

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























