







在MATLAB中,常用的系统建模方法包括传递函数模型、零极点模型以及状态空间模型。
传递函数模型是一种描述系统输入和输出之间关系的数学模型。在MATLAB中,可以使用tf命令来创建传递函数模型。该命令可以根据提供的系数向量和指定的时间单位,自动构建传递函数模型。通过这种方法,我们可以方便地建立传递函数模型,并进行后续的控制系统设计。
零极点模型是一种通过系统的零点和极点来描述系统特性的模型。在MATLAB中,可以使用zpk命令来创建零极点模型。该命令可以根据提供的零点和极点向量,自动构建零极点模型。通过这种方法,我们可以更深入地了解系统的频率特性,并进行更精确的控制系统设计。
状态空间模型是一种描述系统内部状态随时间变化的数学模型。在MATLAB中,可以使用ss命令来创建状态空间模型。该命令可以根据提供的状态空间矩阵和指定的时间单位,自动构建状态空间模型。通过这种方法,我们可以更全面地了解系统的动态特性,并进行更高级的控制算法设计。
总的来说,这三种系统建模方法都有各自的优点和适用场景。我们可以根据具体的控制系统设计需求,选择最合适的建模方法来进行系统建模。
1系统传递函数模型描述:
命令格式:
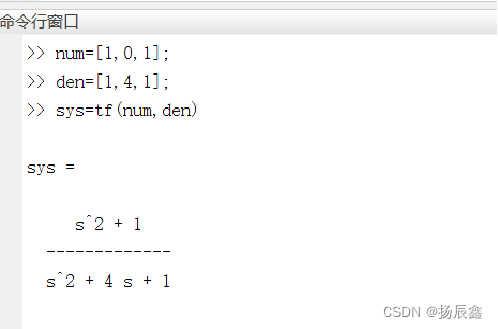
sys=tf(num,den,Ts);其中,num、den为分子多项式降幂排列的系数向量,Ts表示采样时间,缺省时描述的是连续传递函数。

MATLAB运算结果如下图所示:
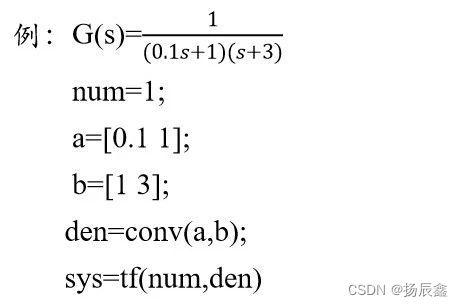
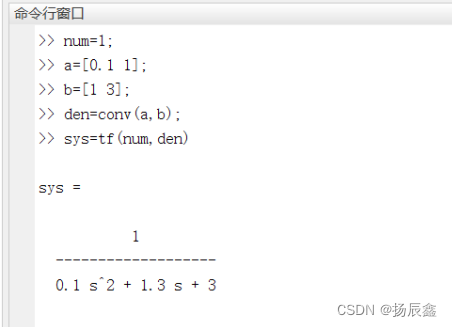
若传递函数的分子、分母为因式连乘形式,可以考虑采用conv命令进行多项式相乘。这个命令可以将分子和分母中的因式进行相乘,得到展开后的多项式。在得到展开后的多项式后,我们可以将其降幂排列,得到系数向量。
接下来,我们可以使用tf命令来建立传递函数模型。这个命令可以根据提供的系数向量和指定的时间单位,自动构建传递函数模型。通过这种方法,我们可以方便地建立传递函数模型,并进行后续的控制系统设计。
MATLAB运算结果如下图所示:
2系统零极点模型描述:
命令格式:
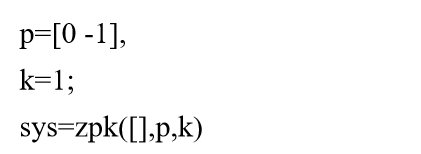
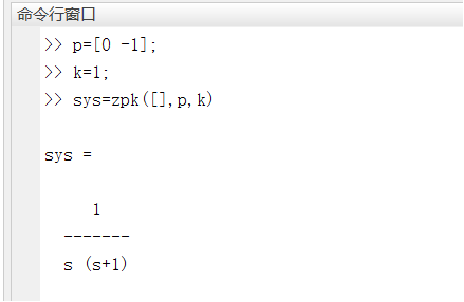
sys=zpk(z,p,k,Ts)其中,在z,p,k分别表示系统的零点、极点和增益,若无零、极点,则用[]表示;Ts表示采样时间,缺省时描述的是连续系统。

有题可知系统无零点,极点为0、-1,增益为1。
MATLAB程序语言:
|
MATLAB运算结果如下图所示:
|
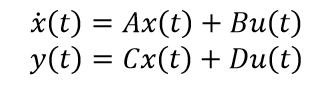
3状态空间模型描述:
状态空间模型为:
命令格式:
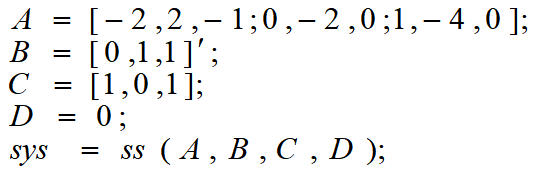
sys=ss(A,B,C,D,Ts)其中,A、B、C、D表示状态空间模型的系数矩阵,Ts表示采样时间,缺省时描述的是连续系统。
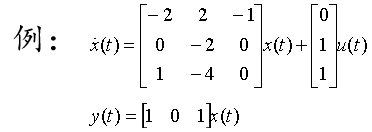
有题可知:
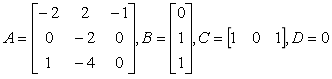
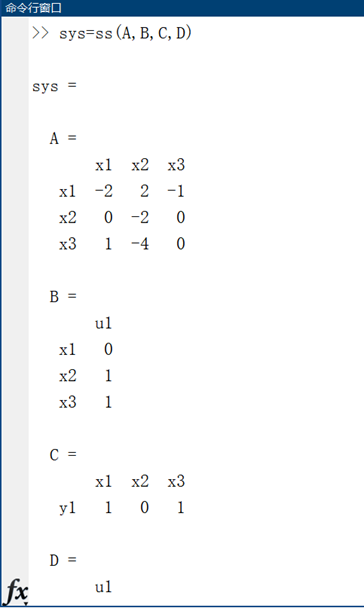
MATLAB程序语言:
MATLAB运算结果如下图所示:
4显示系统的状态矩阵形式:
命令格式:
[A,B,C,D]=ssdata(sys)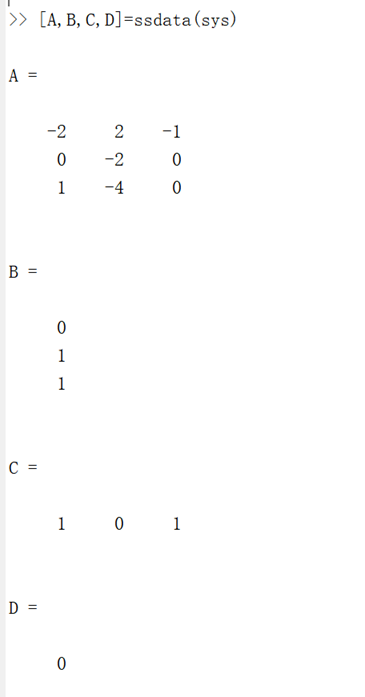
















 234
234











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











