









VS 界面卡顿
最近用ubuntu20.04,使用vscode和chrome的时候,经常会莫名卡顿。
经查,需要去掉gpu的支持
修改 /usr/share/applications/code.desktop
Exec=/usr/share/code/code --disable-gpu --unity-launch $F
好多了
扩展安装
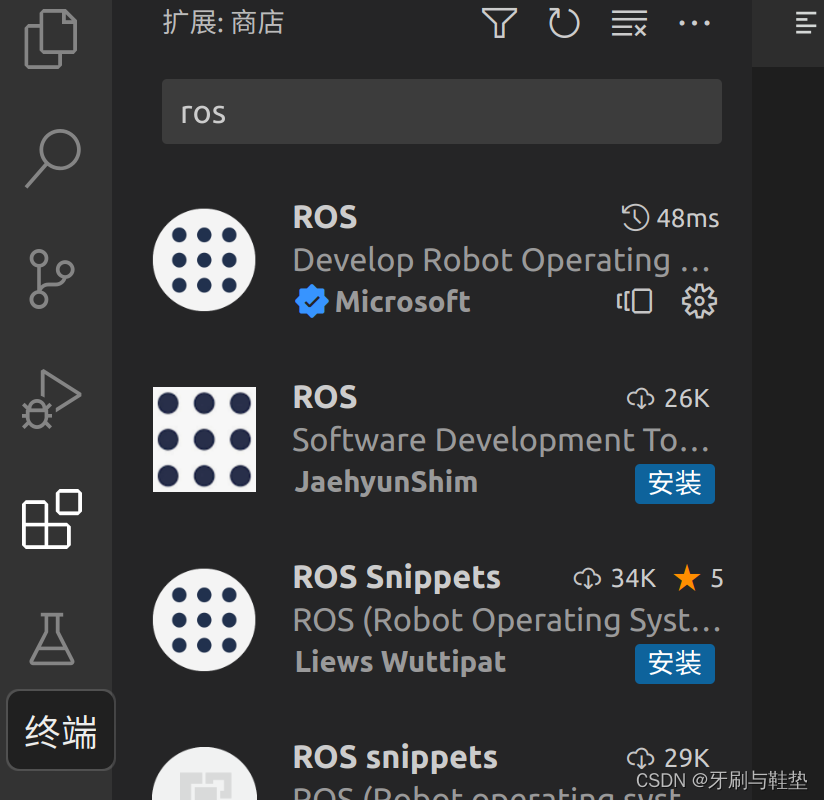
在扩展中搜索并安装ROS、C++、python、CMake和CMake Tools。
工作空间基础操作命令介绍
打开工作空间
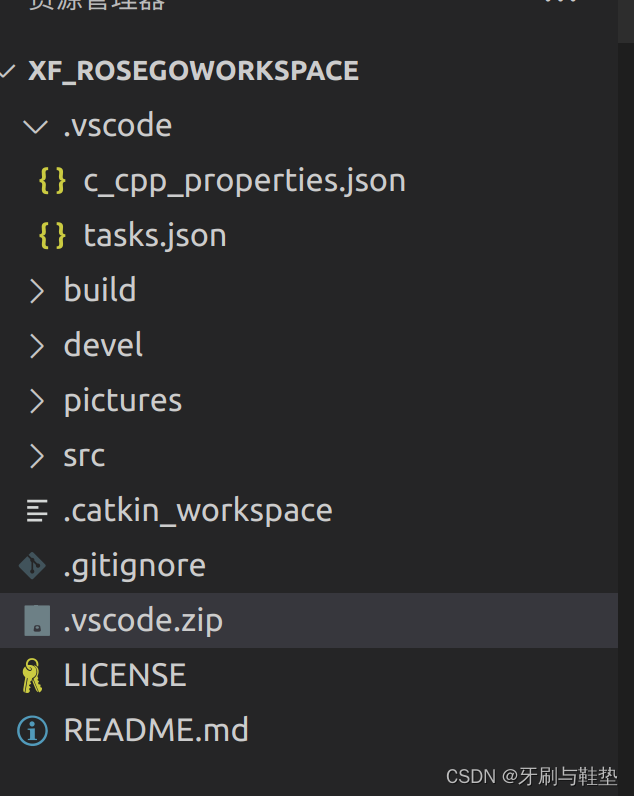 文件→打开文件夹(最开始打开的时候是没有.vscode文件夹的)
文件→打开文件夹(最开始打开的时候是没有.vscode文件夹的)
新建功能包
右键src文件夹,选择新建功能包(通常是最后一条命令)
创建终端窗口
如果需要新建终端的话,就点击下图中的加号

编译
终端窗口输入 catkin_make
 这是因为我是ros1和ros2两个系统的原因
这是因为我是ros1和ros2两个系统的原因
.vscode文件配置
task.json文件的建立与编辑
随便打开一个Cpp程序
点击ctrl+shift+B

选择上图中的小螺丝 ,.vscode下就会生成一个task.json文件,这是用来执行

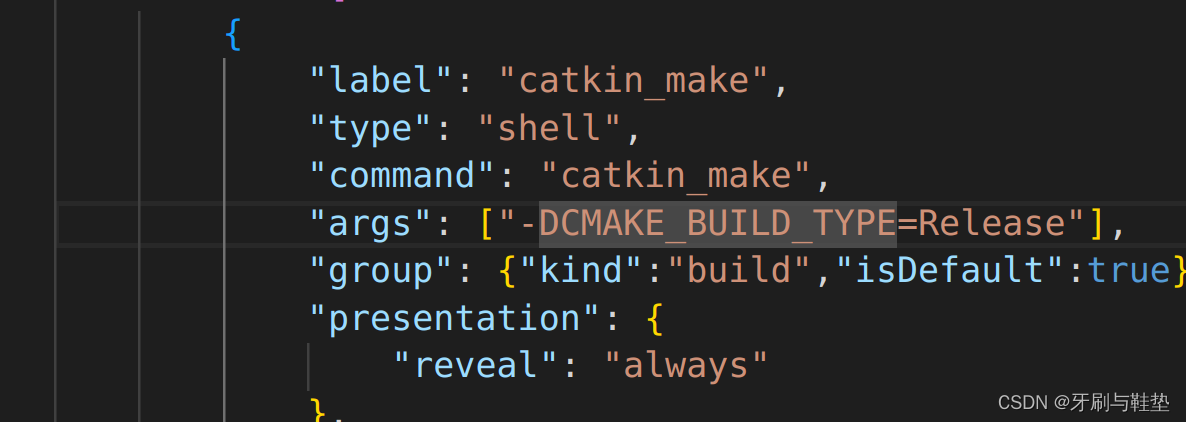
将整个文件中的内容替换成下面的代码
{
"version": "2.0.0",
"tasks": [
{
"type": "catkin_make",
"args": [
"--directory",
"/media/xiaofei/软件/0001ubuntu软件/007ros/XF_ROSEGOworkspace",
"-DCMAKE_BUILD_TYPE=RelWithDebInfo",
"-j1"
],
"problemMatcher": [
"$catkin-gcc"
],
"group": "build",
"label": "catkin_make: build"
}
]
}/media/xiaofei/软件/0001ubuntu软件/007ros/XF_ROSEGOworkspace替换成你工作空间的文件夹目录
c_cpp_properties.json文件的创建与编辑
Ctrl+Shift+P

点击第一个创建c_cpp_properties.json文件

如果是编译c++文件就不需要更改,但是如果是ros包中的c++文件的话则需要将图(1)的内容替换成图(2)


图(1) 图(2)
includePath
其中includePath后面是该项目下所有.h头文件的文件夹目录,没错所有的头文件,缺一个都不行,一个比较简单办法就在创建c_cpp_properties.json文件后关掉vscode然后再打开,它就会自动填充这些项
另外 是ros系统头文件的目录,需要自己添加,添加的时候请注意自己安装的ros版本,我的版本是noetic。
是ros系统头文件的目录,需要自己添加,添加的时候请注意自己安装的ros版本,我的版本是noetic。
includePath修改后的配置应该是这样的,注意逗号的位置

compilerPath
compilerPath是编译器的位置,gcc是c语言编译器,c++的话要改成g++

cStandard
cStandard是什么我不知道,一般是不动

cppStandard
cppStandard是编译器版本,11和14比较好用

intelliSenseMode
intelliSenseMode我的理解四系统的版本,一般是自动生成,不用管

launch调试
创建launch.jsion文件
点击这里
launch文件的配置
弹出窗口下点击“创建launch.json文件”
弹出窗口下选择cmak

选择ROS:Launch

选择你要调试的launch文件
或者打开launch.json文件
点击右下角的添加配置

选择ROS:Launch
文件中就会多出这们一部分内容

name是用于区分不同的调试命令的,因为在一个launch中可以添加多个调试命令
target则是你要调试的文件的目录+文件名+文件类型
launch文件的运行与调试
接着点击运行与调试

下拉三角选择要调试的launch文件

点击三角标志就可以开始调试和运行对应的文件了。
vscode 卸载命令“”
卸载code
sudo apt-get remove code
删除配置
sudo apt-get purge code
删除依赖
sudo apt-get autoremove
重启
sudo reboot














 9260
9260











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









