







第一步:启动ros master
打开新的终端
roscore
第二步:启动小海龟仿真器
打开新的终端
rosrun turtlesim turtlesim_node
第三步:启动海龟控制节点
打开新的终端
rosrun turtlesim turtle_teleop_key
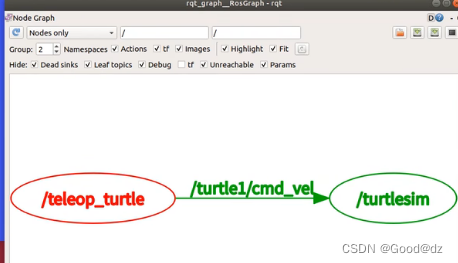
 第四步:查看节点之间的关系
第四步:查看节点之间的关系
rqt_graph
代码功能注释
roscore是所有节点运行的的管理器,使用ros系统的首先运行的指令
rosrun运行某个功能包某个节点的指令,rosrun后面添加某个功能包的名字和对应的节点名字
rqt_graph:显示当前系统运行情况的动态图形
rosbag record -a -O 保存文件的名字:记录话题运行的内容
rosbag play 保存文件的名字:复现记录好的话题内容
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim(这里是my_turtle)则订阅该话题以接收该消息。















 4120
4120











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









