







运行环境:
ubuntu20.04 noetic
宏基暗影骑士笔记本
思路:
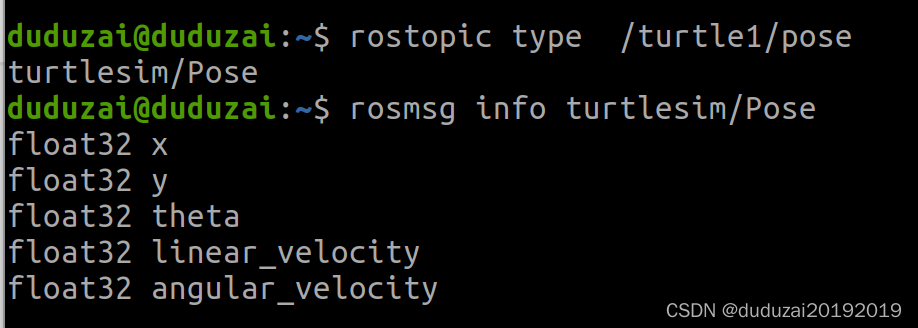
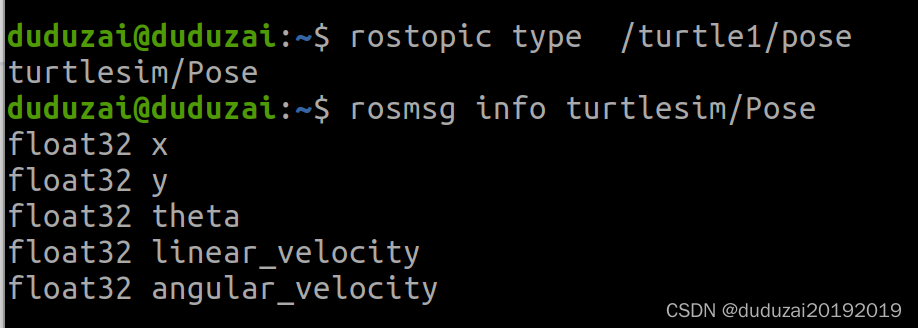
rostopic type /turtle1/pose
rosmsg info turtlesim/Pose
查看乌龟位姿话题的消息格式
订阅话题
回调函数通过指针把消息格式都打印出来:x, y, theta, linear_velocity, angular_velocity
需求:
订阅小乌龟的位姿: 时时获取小乌龟在窗体中的坐标并打印
1.1 获取乌龟位姿消息类型和消息格式
1)启动乌龟控制节点
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
2)获取 turtlesim/Pose 消息类型和消息格式
rostopic type /turtle1/pose
rosmsg info turtlesim/Pose
1.2 创建工作空间
mkdir -p demo01_ws/src
cd demo01_ws
catkin_make
code .
1.3编写订阅
1) 在工作空间src目录下创建功能包
turtle
roscpp rospy std_msgs turtlesim
2) 在功能包src目录下新建turtle_sub.py文件
/*
订阅小乌龟的位姿: 时时获取小乌龟在窗体中的坐标并打印
准备工作:
1.获取话题名称 /turtle1/pose
2.获取消息类型 turtlesim/Pose
3.运行前启动 turtlesim_node 与 turtle_teleop_key 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建 ROS 句柄
4.创建订阅者对象
5.回调函数处理订阅的数据
6.spin
*/
#include "ros/ros.h"
#include "turtlesim/Pose.h"
void doPose(const turtlesim::Pose::ConstPtr& p){
ROS_INFO("乌龟位姿信息:x=%.2f,y=%.2f,theta=%.2f,lv=%.2f,av=%.2f",
p->x,p->y,p->theta,p->linear_velocity,p->angular_velocity
);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"sub_pose");
// 3.创建 ROS 句柄
ros::NodeHandle nh;
// 4.创建订阅者对象
ros::Subscriber sub = nh.subscribe<turtlesim::Pose>("/turtle1/pose",1000,doPose);
// 5.回调函数处理订阅的数据
// 6.spin
ros::spin();
return 0;
}
1.4修改CMakeList
add_executable(turtle_sub.cpp src/turtle_sub.cpp)
target_link_libraries(turtle_sub.cpp
${catkin_LIBRARIES}
)
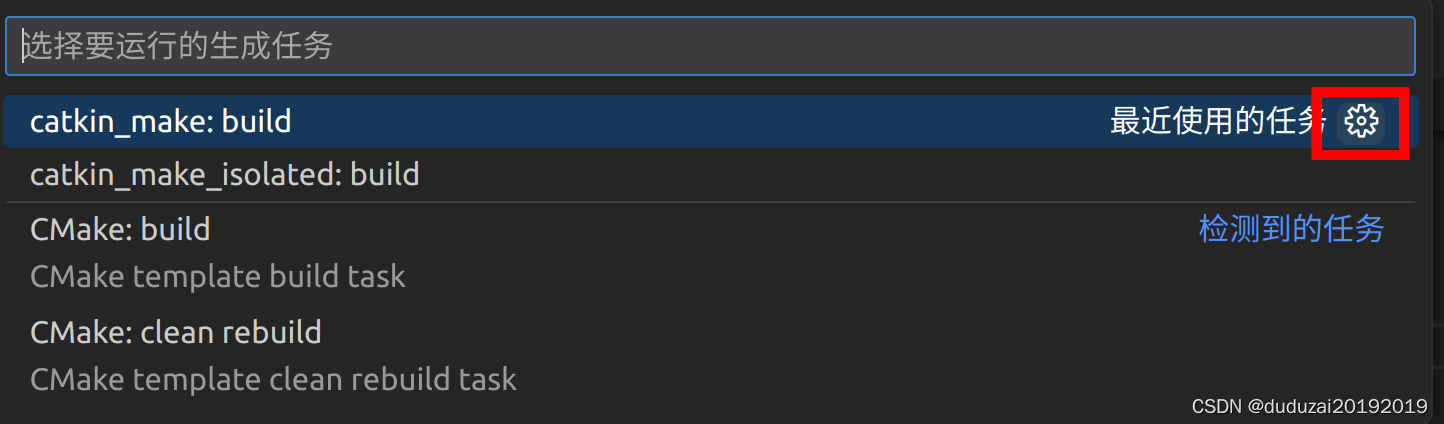
1.5编译运行
ctrl+shift+B 更换配置代码
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
roscore
source./devel/setup.bash
rosrun turtle turtle_sub.py
按键盘上下左右按键,数据会发生变化
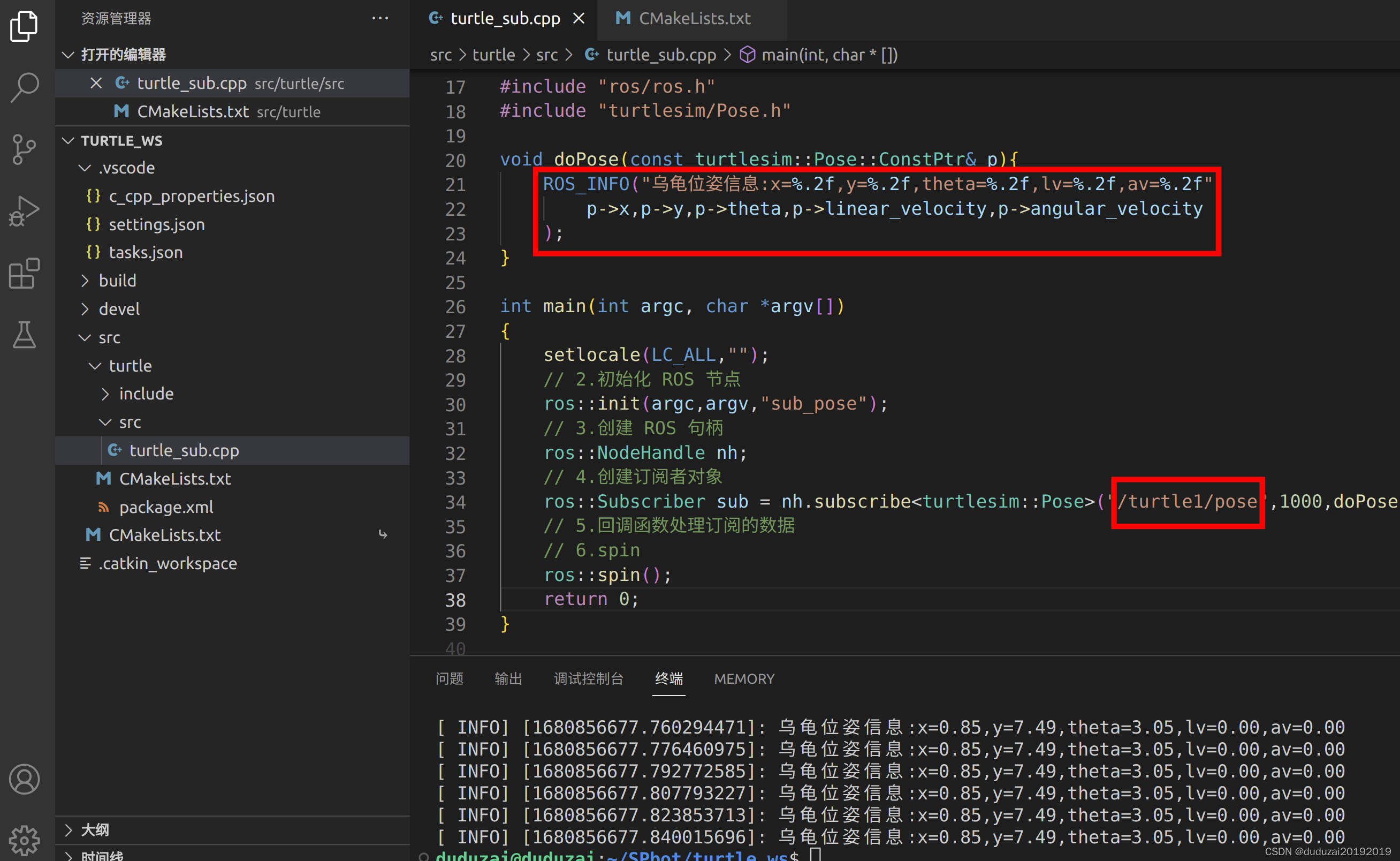
p->x,p->y,p->theta,p->linear_velocity,p->angular_velocity
通过指针把消息格式都打印出来:x, y, theta, linear_velocity, angular_velocity
















 1392
1392











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











