







 AUTOSAR-CP是一种标准化的汽车电子系统架构,旨在提高互操作性、可重用性和可扩展性。软件平台基于此架构提供开发工具,包括应用层、运行时环境层、基础软件层和硬件抽象层。当前生态中,市场需求大,技术门槛高,竞争激烈,市场前景广阔。主要供应商如Vector、EB和普华等各有特色,华为的VOS则代表了深度参与的模式。未来,AP和CP将协同发展,平台也将更注重本土化发展。
AUTOSAR-CP是一种标准化的汽车电子系统架构,旨在提高互操作性、可重用性和可扩展性。软件平台基于此架构提供开发工具,包括应用层、运行时环境层、基础软件层和硬件抽象层。当前生态中,市场需求大,技术门槛高,竞争激烈,市场前景广阔。主要供应商如Vector、EB和普华等各有特色,华为的VOS则代表了深度参与的模式。未来,AP和CP将协同发展,平台也将更注重本土化发展。
纲
AUTOSAR-CP软件架构
AUTOSAR-CP软件平台
AUTOSAR-CP平台生态现状
AUTOSAR-CP平台未来展望
序
AUTOSAR-CP的软件架构和AUTOSAR-CP软件平台生态是密不可分的。前者是理论基础,是市面上所有AUTOSAR-CP软件平台在开发时的遵循的设计规范。后者是实践,是AUTOSAR-CP软件架构实际落地的工程产物,同时也是汽车软件工程师的工具和帮手。AUTOSAR-CP软件平台的重要性不言而喻,AUTOSAR-CP软件平台能够帮助公司快速、低人工成本、高质量地搭建出MCU软件系统。
本文旨在借助AUTOSAR-CP的软件架构理清汽车软件开发中AUTOSAR-CP软件平台的功能职责,然后向您介绍AUTOSAR-CP软件平台的生态现状与未来展望。

AUTOSAR-CP软件架构
架构图
AUTOSAR (Automotive Open System Architecture)是一种标准化的汽车电子系统架构,旨在提高汽车电子系统的互操作性、可重用性和可扩展性。AUTOSAR-CP (Classic Platform)是AUTOSAR标准的一个版本。
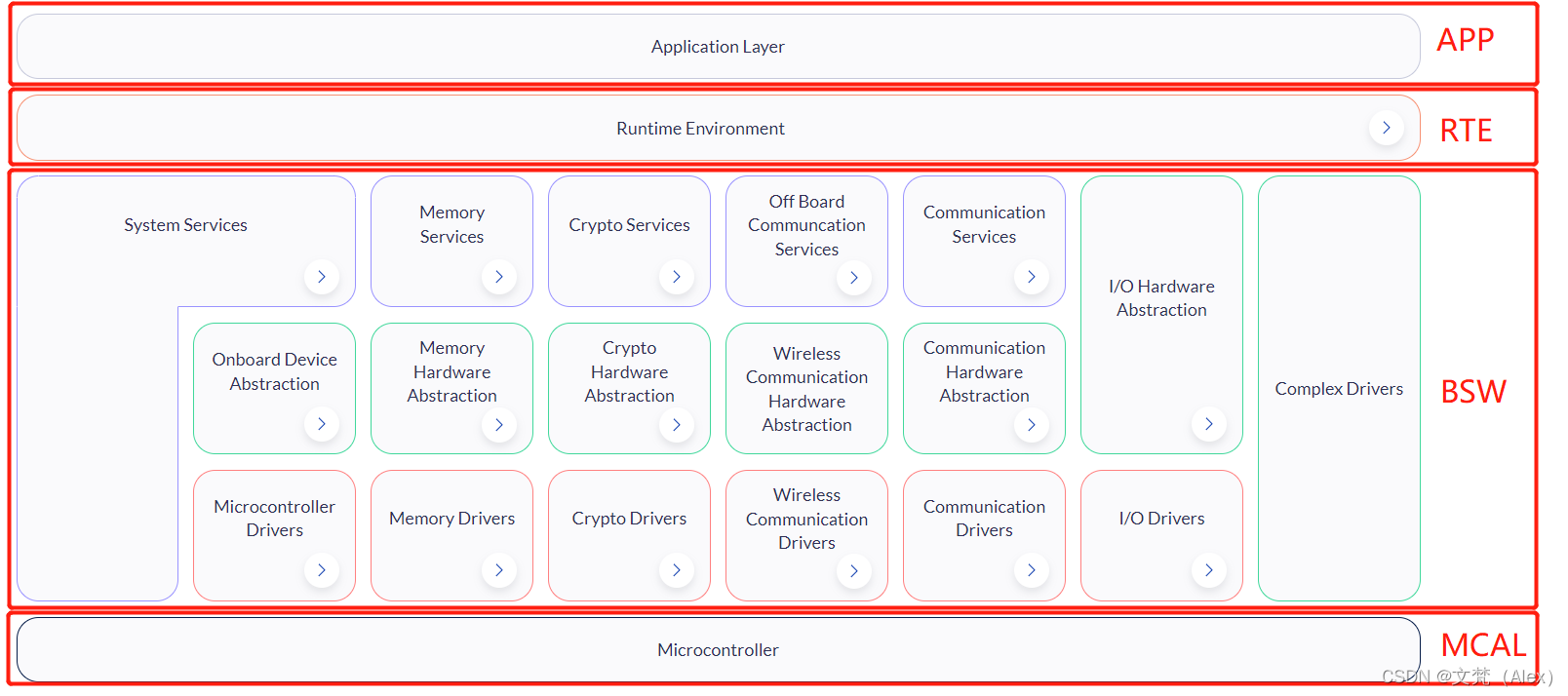
AUTOSAR-CP采用了分层架构。AUTOSAR-CP将整个系统划分为4个主要层次:应用层(APP)、运行时环境层(RTE)、基础软件层(BSW)和硬件抽象层(MCAL)。
应用层(APP):负责处理特定的业务逻辑,是整个系统的最顶层。一般会根据芯片承担的特定业务进行定制化开发。
运行时环境层(RTE):是APP和BSW之间的接口层,向上层(APP层)提供与硬件无关的接口和服务,是为了隔离APP和BSW而生的。承担的是操作系统中的“为用户提供接口”功能。同时为了满足复杂的汽车电子控制的系统设计和实现,RTE还提供“通信与事件处理、状态管理与错误处理、运行时配置、代码生成与集成”等功能。
基础软件层(BSW):提供了常见的功能库函数。通过各个功能模块共同承担的是操作系统中的“任务调度,内存管理”功能。除此以外AUTOSAR-CP作为汽车软件的专属架构,还需要在BSW层中为汽车应用场景提供丰富的软件工具,例如“通信接口、诊断服务、电源管理、安全管理、故障管理”等。
硬件抽象层(MCAL):是对底层硬件进行抽象,使上层软件可以独立于具体的硬件平台。承担的是操作系统中的“管理硬件”功能。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9481
9481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









