







Visual-lidar Odometry and Mapping: Low-drift, Robust, and Fast
Abstract
提出了一种新的使用激光雷达里程计和视觉里程计的框架,提升了表现,特别是在剧烈运动和短暂缺失视觉特征的情况。提出使用视觉里程计高频低精度在线估计帧间运动并且匹配校准高频雷达采集的点云,然后基于激光雷达里程计同时修正运动估计和点云配准。(结合DEMO和LOAM两种方法)
SYSTEM OVERVIEW
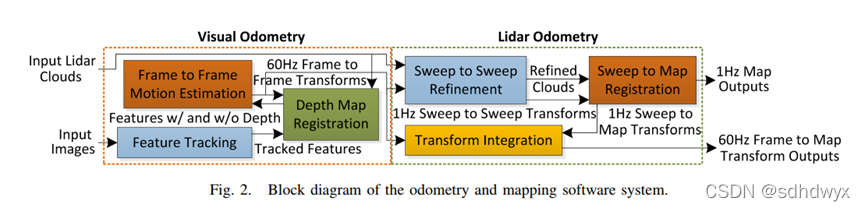
视觉里程计
特征点的运动描述如下:
对有深度信息的特征点,将等式按行展开得到三个等式,联立三个等式得到如下等式:


对无深度信息的特征点展开等式化简得到:

由此分别得到有深度信息和无深度信息时的运动估计损失函数,用非线性最小二乘求解。
雷达里程计
对视觉里程计计算的转移矩阵取时间平均,做为雷达里程计的非线性最小二乘的初始值,对运动估计进行修正。


















 1356
1356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











