







基础知识:
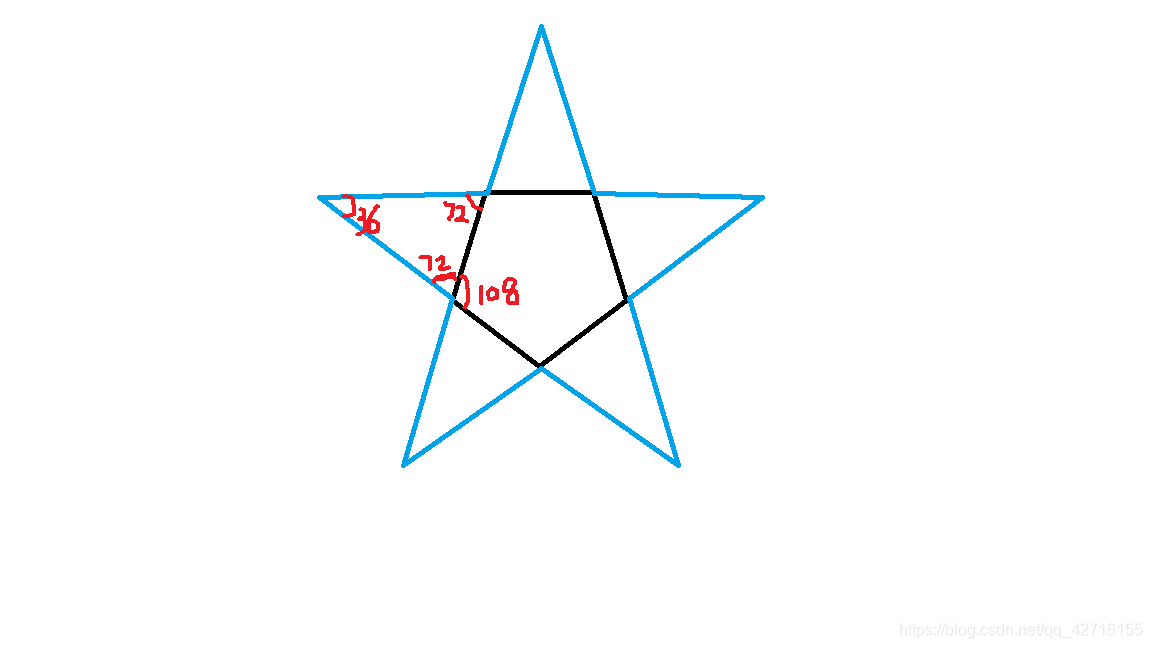
正五角星的角尖是36度,拐度是108度。
分析:
可以把五角星分成五个相同的等腰直接三角和一个正五边形,如图片。
多边形内角和计算公式:(n - 2)×180°(n大于等于3且n为整数)。
根据公式,可以算出五边形内角和为(5-2)×180°=540°,所以五边形每个角的度数为:540°÷5=108°。
已知正五边形每个角都是108° ,则等腰直角三角形的下面的两个相等的角为72°。
三角形内角和为180°,则三角形上面的那个角=180°-72°-72°=36°
所以,五角星的五个顶角各是36°,拐角度数=180-(180-36)÷2=108°。
五角星计算 ,确定坐标点:
说明:
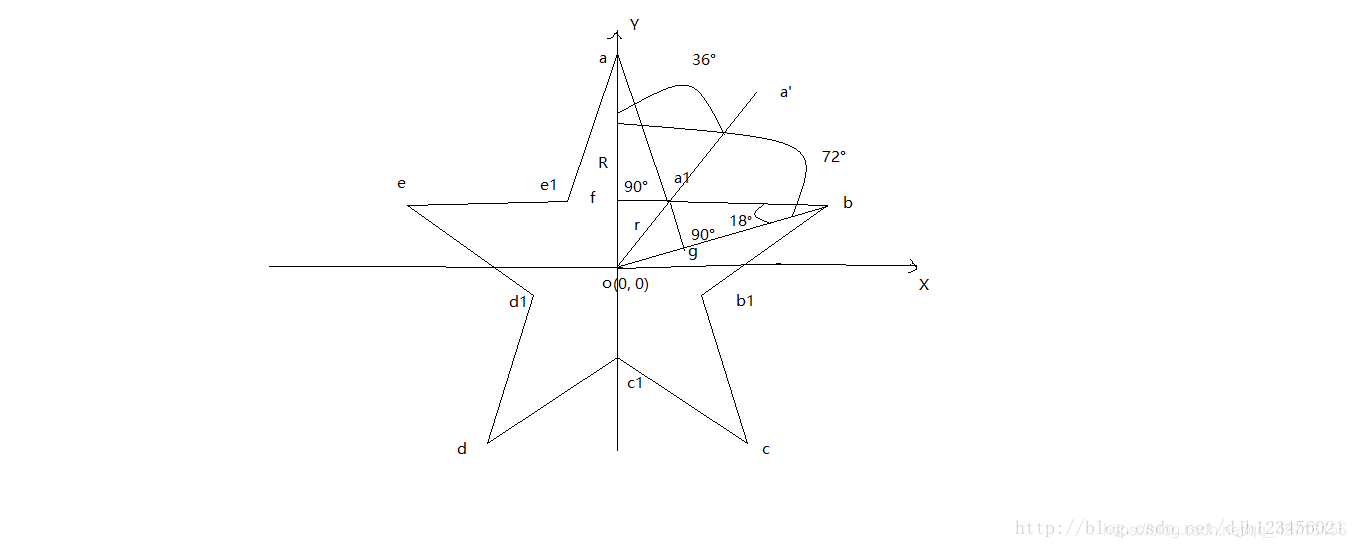
① 坐标原点o(0,0)为坐标原点
② 五角星的长轴为R = |oa|,长度已知
③ 五角星的短轴为r = |oa1|
④ 弧度制为rad = π/180 rad
五角星分为以下几个步骤:
① 求五角星外五个顶点的坐标(a,b, c, d, e)
由图可知:∠fbg = 18°,∠aoa’ = ∠a’ob = 36°, ∠aob = 72°
由极坐标公式:
x=rcos(θ),
x=rsin(θ),
可以得到外五角星的五个坐标:
((R * cos(90°+ k * 72°+ yDegree)), (R * sin(90°+ k * 72°+ yDegree)))其中k = 0、1、2、3、4, yDegree为oa与y轴的夹角(如下图),默认为0。
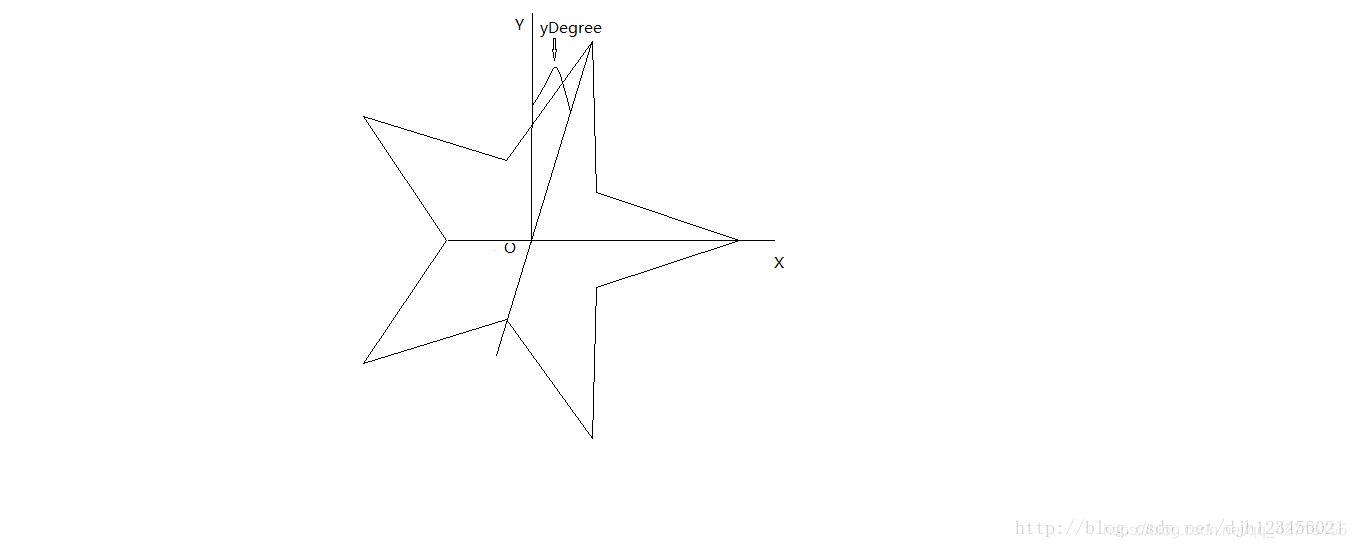
但画图时会由中心点O(x, y)确定五角星外五个顶点的坐标,经过坐标变换为:
(x -(R * cos(90°+ k * 72°+ yDegree)), y - (R * sin(90°+ k * 72°+yDegree)))
②求解五角星内五顶点坐标(a1, b1, c1,d1, e1)
由图可知:r * cos(36°) = |fo| = R * sin(18°)
所以:r = R * sin(18°) / cos(36°);
根据步骤①相同方法得到五角星内五顶点坐标:
((R* cos(90°+ 36°+ k * 72°+yDegree)), (R * sin(90°+ 36°+ k * 72°+yDegree)))其中k = 0、1、2、3、4, yDegree为oa与y轴的夹角,默认为0。
但画图时会由中心点O(x, y)确定五角星外五个顶点的坐标,经过坐标变换为:
(x -(R * cos(90°+ 36°+ k * 72°+yDegree)), y - (R * sin(90°+ 36°+ k* 72°+ yDegree)))
原文链接:计算机图形学-五角星的画法

















 3922
3922

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









